






22
Oct
未来的天地枢纽——太空天梯
By 苏剑林 | 2010-10-22 | 24958位读者 | 引用
开发太空天梯
漫话
BoJone认为,科学的意义并非在于无休止地计算,而是利用有限的科学理论来解释尽可能多的自然、生活现象。正因如此,科学家们追求和谐、简洁、优美的科学理论。科学就是想方设法地把未知变成已知,并在此基础上进一步发展。
随着媒体技术的发展,我们接触信息的渠道越来越多。每每我们从互联网或报纸上看到一则科学新闻时,我们几乎都会为之兴奋。但是,外行看热闹,内行看门道。对于真正热爱科学的朋友来说,也许会更加感兴趣新闻内容的来由。也就是说,我们希望进一步了解结论是怎样得出来的——哪怕只是在很浅的层面上认识。
7
Nov
为什么是抛物线?——聚光面研究
By 苏剑林 | 2010-11-07 | 93801位读者 | 引用
13
Nov
意犹未尽——继续光学曲线
By 苏剑林 | 2010-11-13 | 54871位读者 | 引用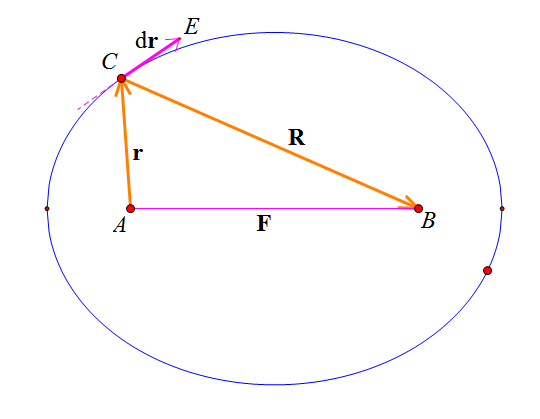
3
Feb
[SETI-50周年]茫茫宇宙觅知音
By 苏剑林 | 2011-02-03 | 21069位读者 | 引用转载自2011年1月的《天文爱好者》 作者:薛国轩
“多萝西计划”再探地外文明
据美国空间网站2010年11月13日报道,在人类“探索地外文明”(英文缩写为SETI)50周年纪念之际,世界多个国家的天文学家从本月起再度展开“且听外星人”的联合行动,以延续开始于1960年的“奥兹玛计划”。新的探索活动被命名为“多萝西计划”(Project Dorothy),已于11月5日正式启动,将持续整整一个月时间,来自澳大利亚、日本、韩国、意大利、荷兰、法国、阿根廷和美国的天文学家参与其中。他们将把大大小小的望远镜指向地球周围的一些星球,以期收听到外星人的“天外来音”。

Allen Telescope Array
11
Feb
施密特系统的校正镜方程求解
By 苏剑林 | 2011-02-11 | 33790位读者 | 引用非抛物面望远镜的校正镜方程求解
The Corrector Plate of Non-parabola Telescope
本文在牧夫天文论坛的讨论:
http://www.astronomy.ac/bbs/thread-160257-1-1.html
为了克服折射望远镜的色差问题,1670年,牛顿制造了第一台实用的反射式望远镜,将望远镜的主镜由玻璃透镜换成了抛物反射面,从而消除了色差。然而,相比球面镜,大口径的抛物面并不容易磨制。因为制作大球面镜只需要将曲率相等的小镜片相对自由组合在一起就行了,而抛物线每点的曲率并不相等,所以需要逐个磨制曲率不等的小镜片,并按照严格的顺序组合起来。这无疑大大增加了磨制难度。

Lamost是目前世界最大的施密特望远镜
为了解决这一难题,天文学家们想到了一个折衷的办法:以球面为主镜,并配以校正镜来校正球差。迎着这一思路,施密特望远镜随之而生。而当代的大望远镜基本上都是沿用这一思路。然而,校正镜是一个比抛物面更加复杂的四次曲面,磨制工艺要求更高,因此,校正镜也不宜过大。
26
Feb
有限Vs无限:无穷电荷板的场|平行板电容
By 苏剑林 | 2011-02-26 | 52188位读者 | 引用
5
Apr
重提“旋转弹簧伸长”问题(变分解法)
By 苏剑林 | 2011-04-05 | 20784位读者 | 引用感谢Awank-Newton读者的来信,本文于2013.01.30作了修正,主要是弹性势能的正负号问题。之前连续犯了两个错误,导致得出了正确答案。现在已经修正。参考《平衡态公理的修正与思考》
在下面的两篇文章中,BoJone已经介绍了这个“旋转弹簧伸长”的问题,并从两个角度提供了两种解答方法。前者列出了一道积分方程,然后再转变为微分方程来解;后者直接从弹性力学的角度来列出一道二阶微分方程,两者殊途同归。
http://kexue.fm/archives/782/
今天,再经过一段时间的变分法涉猎后,BoJone尝试从变分的角度(总能量最小)来给出一种新的解法。同样设r为旋转达到平衡后弹簧上一点到旋转中心的距离,该点的线密度为$\lambda =\lambda (r)$,该点到中心的弹簧质量为$m=m(r)$,旋转前的长度为$l_0$,旋转平衡后的长度为$l_1$。由于弹簧旋转后已经达到了平衡状态,由平衡态公理(参看《自然极值》系列),平衡意味着总能量“动能-势能”取极值。
15
May
地球引力场的悬链线方程
By 苏剑林 | 2011-05-15 | 65190位读者 | 引用之前曾在《自然极值》系列文章中提到过均匀重力场下的悬链线形状问题,并且在那文章中向读者提出:在一个质点(地球)引力场中的悬链线形状会是怎么样的。说实话,提出这个问题的时候,我还不懂怎么解答这个问题,不过现在会了,回头一看,已经几个月了,时间过得真快...
与之前的思路一样,我们依旧采用的是“平衡态公理”,即总势能最小。从天体力学中我们知道,任意两个质点间的势能为$-\frac{Gm_1 m_2}{r}$。对于本题的悬链线问题,我们可以把地球放到坐标原点位置,而悬链的两个固定点分别为$(x_1,y_1)$和$(x_2,y_2)$,链的总长度为l。即
$$\int_{x_1}^{x_2} \sqrt{dx^2+dy^2}=l$$

最近评论