






1
Jun
泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练
By 苏剑林 | 2020-06-01 | 98557位读者 | 引用提高模型的泛化性能是机器学习致力追求的目标之一。常见的提高泛化性的方法主要有两种:第一种是添加噪声,比如往输入添加高斯噪声、中间层增加Dropout以及进来比较热门的对抗训练等,对图像进行随机平移缩放等数据扩增手段某种意义上也属于此列;第二种是往loss里边添加正则项,比如$L_1, L_2$惩罚、梯度惩罚等。本文试图探索几种常见的提高泛化性能的手段的关联。
随机噪声
我们记模型为$f(x)$,$\mathcal{D}$为训练数据集合,$l(f(x), y)$为单个样本的loss,那么我们的优化目标是
\begin{equation}\mathop{\text{argmin}}_{\theta} L(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}}[l(f(x), y)]\end{equation}
$\theta$是$f(x)$里边的可训练参数。假如往模型输入添加噪声$\varepsilon$,其分布为$q(\varepsilon)$,那么优化目标就变为
\begin{equation}\mathop{\text{argmin}}_{\theta} L_{\varepsilon}(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}, \varepsilon\sim q(\varepsilon)}[l(f(x + \varepsilon), y)]\end{equation}
当然,可以添加噪声的地方不仅仅是输入,也可以是中间层,也可以是权重$\theta$,甚至可以是输出$y$(等价于标签平滑),噪声也不一定是加上去的,比如Dropout是乘上去的。对于加性噪声来说,$q(\varepsilon)$的常见选择是均值为0、方差固定的高斯分布;而对于乘性噪声来说,常见选择是均匀分布$U([0,1])$或者是伯努利分布。
添加随机噪声的目的很直观,就是希望模型能学会抵御一些随机扰动,从而降低对输入或者参数的敏感性,而降低了这种敏感性,通常意味着所得到的模型不再那么依赖训练集,所以有助于提高模型泛化性能。
5
Jun
为什么梯度裁剪能加速训练过程?一个简明的分析
By 苏剑林 | 2020-06-05 | 33191位读者 | 引用本文介绍来自MIT的一篇ICLR 2020满分论文《Why gradient clipping accelerates training: A theoretical justification for adaptivity》,顾名思义,这篇论文就是分析为什么梯度裁剪能加速深度学习的训练过程。原文很长,公式很多,还有不少研究复杂性的概念,说实话对笔者来说里边的大部分内容也是懵的,不过大概能捕捉到它的核心思想:引入了比常用的L约束更宽松的约束条件,从新的条件出发论证了梯度裁剪的必要性。本文就是来简明分析一下这个过程,供读者参考。
梯度裁剪
假设需要最小化的函数为$f(\theta)$,$\theta$就是优化参数,那么梯度下降的更新公式就是
\begin{equation}\theta \leftarrow \theta-\eta \nabla_{\theta} f(\theta)\end{equation}
其中$\eta$就是学习率。而所谓梯度裁剪(gradient clipping),就是根据梯度的模长来对更新量做一个缩放,比如
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\label{eq:clip-1}\end{equation}
或者
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\label{eq:clip-2}\end{equation}
其中$\gamma > 0$是一个常数。这两种方式都被视为梯度裁剪,总的来说就是控制更新量的模长不超过一个常数,第二种形式也跟RMSProp等自适应学习率优化器相关。此外,更精确地,我们有下面的不等式
\begin{equation}\frac{1}{2}\min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\leq \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\leq \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\end{equation}
也就是说两者是可以相互控制的,所以其实两者基本是等价的。
16
Jun
如何应对Seq2Seq中的“根本停不下来”问题?
By 苏剑林 | 2020-06-16 | 64676位读者 | 引用在Seq2Seq的解码过程中,我们是逐个token地递归生成的,直到出现<eos>标记为止,这就是所谓的“自回归”生成模型。然而,研究过Seq2Seq的读者应该都能发现,这种自回归的解码偶尔会出现“根本停不下来”的现象,主要是某个片段反复出现,比如“今天天气不错不错不错不错不错...”、“你觉得我说得对不对不对不对不对不对...”等等,但就是死活不出现<eos>标记。ICML 2020的文章《Consistency of a Recurrent Language Model With Respect to Incomplete Decoding》比较系统地讨论了这个现象,并提出了一些对策,本文来简单介绍一下论文的主要内容。
解码算法
对于自回归模型来说,我们建立的是如下的条件语言模型
\begin{equation}p(y_t|y_{\lt t}, x)\label{eq:p}\end{equation}
那么解码算法就是在已知上述模型时,给定$x$来输出对应的$y=(y_1,y_2,\dots,y_T)$来。解码算法大致可以分为两类:确定性解码算法和随机性解码算法,原论文分别针对这两类解码讨论来讨论了“根本停不下来”问题,所以我们需要来了解一下这两类解码算法。
23
Jun
从采样看优化:可导优化与不可导优化的统一视角
By 苏剑林 | 2020-06-23 | 57170位读者 | 引用不少读者都应该知道,损失函数与评测指标的不一致性是机器学习的典型现象之一,比如分类问题中损失函数用交叉熵,评测指标则是准确率或者F1,又比如文本生成中损失函数是teacher-forcing形式的交叉熵,评测指标则是BLEU、ROUGE等。理想情况下,当然是评测什么指标,我们就去优化这个指标,然而评测指标通常都是不可导的,而我们多数都是使用基于梯度的优化器,这就要求最小化的目标必须是可导的,这是不一致性的来源。
前些天在arxiv刷到了一篇名为《MLE-guided parameter search for task loss minimization in neural sequence modeling》的论文,顾名思义,它是研究如何直接优化文本生成的评测指标的。经过阅读,笔者发现这篇论文很有价值,事实上它提供了一种优化评测指标的新思路,适用范围并不局限于文本生成中。不仅如此,它甚至还包含了一种理解可导优化与不可导优化的统一视角。
采样视角
首先,我们可以通过采样的视角来重新看待优化问题:设模型当前参数为$\theta$,优化目标为$l(\theta)$,我们希望决定下一步的更新量$\Delta\theta$,为此,我们先构建分布
\begin{equation}p(\Delta\theta|\theta)=\frac{e^{-[l(\theta + \Delta\theta) - l(\theta)]/\alpha}}{Z(\theta)},\quad Z(\theta) = \int e^{-[l(\theta + \Delta\theta) - l(\theta)]/\alpha} d(\Delta\theta)\end{equation}
4
Jul
线性Attention的探索:Attention必须有个Softmax吗?
By 苏剑林 | 2020-07-04 | 224454位读者 | 引用众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是$\mathcal{O}(n^2)$级别的,$n$是序列长度,所以当$n$比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到$\mathcal{O}(n\log n)$甚至$\mathcal{O}(n)$。
前几天笔者读到了论文《Transformers are RNNs: Fast Autoregressive Transformers with Linear Attention》,了解到了线性化Attention(Linear Attention)这个探索点,继而阅读了一些相关文献,有一些不错的收获,最后将自己对线性化Attention的理解汇总在此文中。
Attention
当前最流行的Attention机制当属Scaled-Dot Attention,形式为
\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\label{eq:std-att}\end{equation}
这里的$\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}$,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设$\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times d}$,一般场景下都有$n > d$甚至$n\gg d$(BERT base里边$d=64$)。
25
Jul
学会提问的BERT:端到端地从篇章中构建问答对
By 苏剑林 | 2020-07-25 | 115944位读者 | 引用机器阅读理解任务,相比不少读者都有所了解了,简单来说就是从给定篇章中寻找给定问题的答案,即“篇章 + 问题 → 答案”这样的流程,笔者之前也写过一些关于阅读理解的文章,比如《基于CNN的阅读理解式问答模型:DGCNN》等。至于问答对构建,则相当于是阅读理解的反任务,即“篇章 → 答案 + 问题”的流程,学术上一般直接叫“问题生成(Question Generation)”,因为大多数情况下,答案可以通过比较规则的随机选择,所以很多文章都只关心“篇章 + 答案 → 问题”这一步。
本文将带来一次全端到端的“篇章 → 答案 + 问题”实践,包括模型介绍以及基于bert4keras的实现代码,欢迎读者尝试。
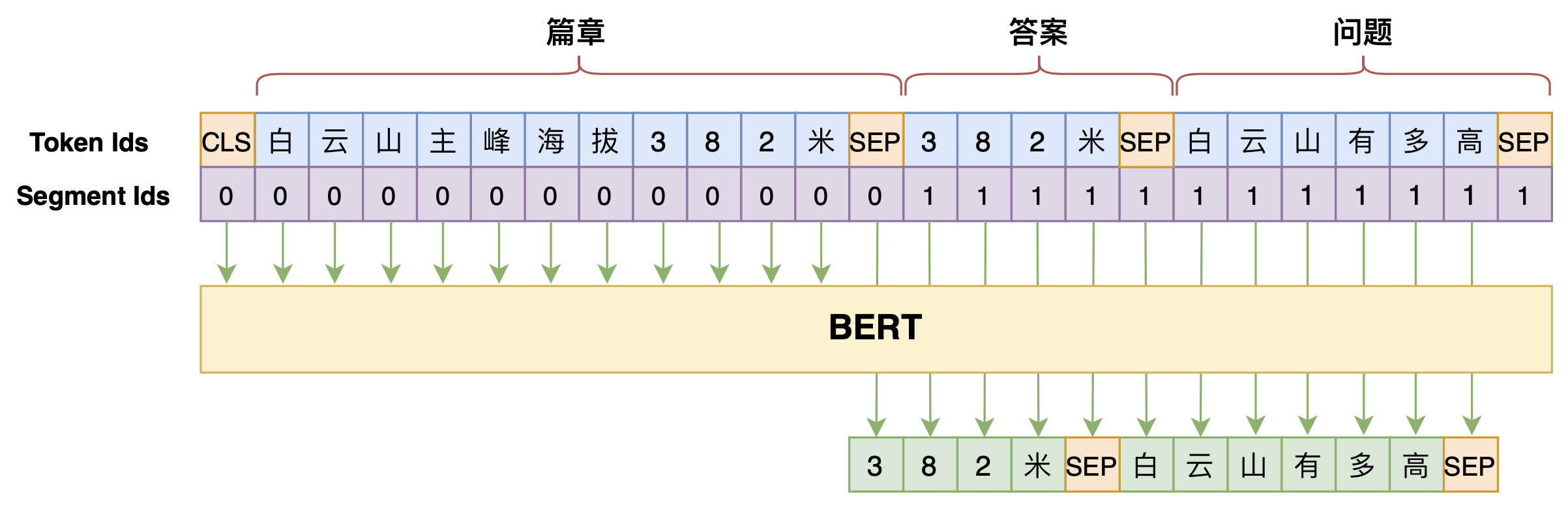
本文的问答生成模型示意图
14
Aug
L2正则没有想象那么好?可能是“权重尺度偏移”惹的祸
By 苏剑林 | 2020-08-14 | 36531位读者 | 引用L2正则是机器学习常用的一种防止过拟合的方法(应该也是一道经常遇到的面试题)。简单来说,它就是希望权重的模长尽可能小一点,从而能抵御的扰动多一点,最终提高模型的泛化性能。但是读者可能也会发现,L2正则的表现通常没有理论上说的那么好,很多时候加了可能还有负作用。最近的一篇文章《Improve Generalization and Robustness of Neural Networks via Weight Scale Shifting Invariant Regularizations》从“权重尺度偏移”这个角度分析了L2正则的弊端,并提出了新的WEISSI正则项。整个分析过程颇有意思,在这里与大家分享一下。
相关内容
这一节中我们先简单回顾一下L2正则,然后介绍它与权重衰减的联系以及与之相关的AdamW优化器。
L2正则的理解
为什么要添加L2正则?这个问题可能有多个答案。有从Ridge回归角度回答的,有从贝叶斯推断角度回答的,这里给出从扰动敏感性的角度的理解。
16
Apr
搜狐文本匹配:基于条件LayerNorm的多任务baseline
By 苏剑林 | 2021-04-16 | 89863位读者 | 引用前段时间看到了“2021搜狐校园文本匹配算法大赛”,觉得赛题颇有意思,便尝试了一下,不过由于比赛本身只是面向在校学生,所以笔者是不能作为正式参赛人员参赛的,因此把自己的做法开源出来,作为比赛baseline供大家参考。
赛题介绍
顾名思义,比赛的任务是文本匹配,即判断两个文本是否相似,本来是比较常规的任务,但有意思的是它分了多个子任务。具体来说,它分A、B两大类,A类匹配标准宽松一些,B类匹配标准严格一些,然后每个大类下又分为“短短匹配”、“短长匹配”、“长长匹配”3个小类,因此,虽然任务类型相同,但严格来看它是六个不同的子任务。

最近评论