






9
Feb
一个二值化词向量模型,是怎么跟果蝇搭上关系的?
By 苏剑林 | 2021-02-09 | 25474位读者 | 引用
果蝇(图片来自Google搜索)
可能有些读者最近会留意到ICLR 2021的论文《Can a Fruit Fly Learn Word Embeddings?》,文中写到它是基于仿生思想(仿果蝇的嗅觉回路)做出来的一个二值化词向量模型。其实论文的算法部分并不算难读,可能整篇论文读下来大家的最主要疑惑就是“这东西跟果蝇有什么关系?”、“作者真是从果蝇里边受到启发的?”等等。本文就让我们来追寻一下该算法的来龙去脉,试图回答一下这个词向量模型是怎么跟果蝇搭上关系的。
BioWord
原论文并没有给该词向量模型起个名字,为了称呼上的方便,这里笔者就自作主张将其称为“BioWord”了。总的来说,论文内容大体上有三部分:
1、给每个n-gram构建了一个词袋表示向量;
2、对这些n-gram向量执行BioHash算法,得到所谓的(二值化的)静态/动态词向量;
3、“拼命”讲了一个故事。
3
Mar
T5 PEGASUS:开源一个中文生成式预训练模型
By 苏剑林 | 2021-03-03 | 176618位读者 | 引用去年在文章《那个屠榜的T5模型,现在可以在中文上玩玩了》中我们介绍了Google的多国语言版T5模型(mT5),并给出了用mT5进行中文文本生成任务的例子。诚然,mT5做中文生成任务也是一个可用的方案,但缺乏完全由中文语料训练出来模型总感觉有点别扭,于是决心要搞一个出来。
经过反复斟酌测试,我们决定以mT5为基础架构和初始权重,先结合中文的特点完善Tokenizer,然后模仿PEGASUS来构建预训练任务,从而训练一版新的T5模型,这就是本文所开源的T5 PEGASUS。

T5 PEGASUS的训练数据示例
12
Jan
CoSENT(二):特征式匹配与交互式匹配有多大差距?
By 苏剑林 | 2022-01-12 | 84728位读者 | 引用一般来说,文本匹配有交互式(Interaction-based)和特征式(Representation-based)两种实现方案,其中交互式是指将两个文本拼接在一起当成单文本进行分类,而特征式则是指两个句子分别由编码器编码为句向量后再做简单的融合处理(算cos值或者接一个浅层网络)。通常的结论是,交互式由于使得两个文本能够进行充分的比较,所以它准确性通常较好,但明显的缺点是在检索场景的效率较差;而特征式则可以提前计算并缓存好句向量,所以它有着较高的效率,但由于句子间的交互程度较浅,所以通常效果不如交互式。
上一篇文章笔者介绍了CoSENT,它本质上也是一种特征式方案,并且相比以往的特征式方案效果有所提高。于是笔者的好胜心就上来了:CoSENT能比得过交互式吗?特征式相比交互式的差距有多远呢?本文就来做个比较。
自动阈值
在文章《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,我们评测CoSENT所用的指标是Spearman系数,它是一个只依赖于预测结果相对顺序的指标,不依赖于阈值,比较适合检索场景的评测。但如果评测指标是accuracy或者F1这些分类指标,则必须确定一个阈值,将预测结果大于这个数的预测结果视为正、小于则为负,然后才能计算指标。在二分类的场景,我们用二分法就可以有效地确定这个阈值。
3
Mar
指数梯度下降 + 元学习 = 自适应学习率
By 苏剑林 | 2022-03-03 | 27907位读者 | 引用前两天刷到了Google的一篇论文《Step-size Adaptation Using Exponentiated Gradient Updates》,在其中学到了一些新的概念,所以在此记录分享一下。主要的内容有两个,一是非负优化的指数梯度下降,二是基于元学习思想的学习率调整算法,两者都颇有意思,有兴趣的读者也可以了解一下。
指数梯度下降
梯度下降大家可能听说得多了,指的是对于无约束函数$\mathcal{L}(\boldsymbol{\theta})$的最小化,我们用如下格式进行更新:
\begin{equation}\boldsymbol{\theta}_{t+1} = \boldsymbol{\theta}_t - \eta\nabla_{\boldsymbol{\theta}}\mathcal{L}(\boldsymbol{\theta}_t)\end{equation}
其中$\eta$是学习率。然而很多任务并非总是无约束的,对于最简单的非负约束,我们可以改为如下格式更新:
\begin{equation}\boldsymbol{\theta}_{t+1} = \boldsymbol{\theta}_t \odot \exp\left(- \eta\nabla_{\boldsymbol{\theta}}\mathcal{L}(\boldsymbol{\theta}_t)\right)\label{eq:egd}\end{equation}
这里的$\odot$是逐位对应相乘(Hadamard积)。容易看到,只要初始化的$\boldsymbol{\theta}_0$是非负的,那么在整个更新过程中$\boldsymbol{\theta}_t$都会保持非负,这就是用于非负约束优化的“指数梯度下降”。
14
Feb
多任务学习漫谈(三):分主次之序
By 苏剑林 | 2022-02-14 | 33844位读者 | 引用多任务学习是一个很宽泛的命题,不同场景下多任务学习的目标不尽相同。在《多任务学习漫谈(一):以损失之名》和《多任务学习漫谈(二):行梯度之事》中,我们将多任务学习的目标理解为“做好每一个任务”,具体表现是“尽量平等地处理每一个任务”,我们可以称之为“平行型多任务学习”。然而,并不是所有多任务学习的目标都是如此,在很多场景下,我们主要还是想学好某一个主任务,其余任务都只是辅助,希望通过增加其他任务的学习来提升主任务的效果罢了,此类场景我们可以称为“主次型多任务学习”。
在这个背景下,如果还是沿用平行型多任务学习的“做好每一个任务”的学习方案,那么就可能会明显降低主任务的效果了。所以本文继续沿着“行梯度之事”的想法,探索主次型多任务学习的训练方案。
目标形式
在这篇文章中,我们假设读者已经阅读并且基本理解《多任务学习漫谈(二):行梯度之事》里边的思想和方法,那么在梯度视角下,让某个损失函数保持下降的必要条件是更新量与其梯度夹角至少大于90度,这是贯穿全文的设计思想。
21
Feb
GPLinker:基于GlobalPointer的事件联合抽取
By 苏剑林 | 2022-02-21 | 73383位读者 | 引用大约两年前,笔者在百度的“2020语言与智能技术竞赛”中首次接触到了事件抽取任务,并在文章《bert4keras在手,baseline我有:百度LIC2020》中分享了一个转化为BERT+CRF做NER的简单baseline。不过,当时的baseline更像是一个用来凑数的半成品,算不上一个完整的事件抽取模型。而这两年来,关系抽取的模型层见迭出,SOTA一个接一个,但事件抽取似乎没有多亮眼的设计。
最近笔者重新尝试了事件抽取任务,在之前的关系抽取模型GPLinker的基础上,结合完全子图搜索,设计一个比较简单但相对完备的事件联合抽取模型,依然称之为GPLinker,在此请大家点评一番。
任务简介
事件抽取是一个比较综合的任务。一个标准的事件抽取样本如下:
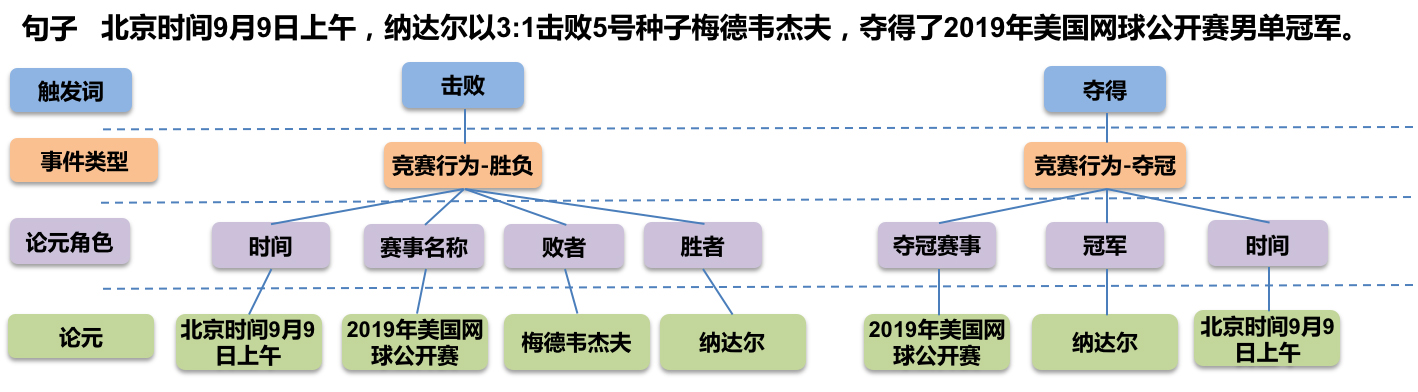
标准的事件抽取样本(图片来自百度DuEE的GitHub)
2
Nov
利用CUR分解加速交互式相似度模型的检索
By 苏剑林 | 2022-11-02 | 25897位读者 | 引用文本相似度有“交互式”和“特征式”两种做法,想必很多读者对此已经不陌生,之前笔者也写过一篇文章《CoSENT(二):特征式匹配与交互式匹配有多大差距?》来对比两者的效果。总的来说,交互式相似度效果通常会好些,但直接用它来做大规模检索是不现实的,而特征式相似度则有着更快的检索速度,以及稍逊一筹的效果。
因此,如何在保证交互式相似度效果的前提下提高它的检索速度,是学术界一直都有在研究的课题。近日,论文《Efficient Nearest Neighbor Search for Cross-Encoder Models using Matrix Factorization》提出了一份新的答卷:CUR分解。

CUR分解示意图
21
Sep
生成扩散模型漫谈(十一):统一扩散模型(应用篇)
By 苏剑林 | 2022-09-21 | 39985位读者 | 引用在《生成扩散模型漫谈(十):统一扩散模型(理论篇)》中,笔者自称构建了一个统一的模型框架(Unified Diffusion Model,UDM),它允许更一般的扩散方式和数据类型。那么UDM框架究竟能否实现如期目的呢?本文通过一些具体例子来演示其一般性。
框架回顾
首先,UDM通过选择噪声分布$q(\boldsymbol{\varepsilon})$和变换$\boldsymbol{\mathcal{F}}$来构建前向过程
\begin{equation}\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}),\quad \boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})\end{equation}
然后,通过如下的分解来实现反向过程$\boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的采样
\begin{equation}\hat{\boldsymbol{x}}_0\sim p(\boldsymbol{x}_0|\boldsymbol{x}_t)\quad \& \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0=\hat{\boldsymbol{x}}_0)\end{equation}
其中$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$就是用$\boldsymbol{x}_t$预估$\boldsymbol{x}_0$的概率,一般用简单分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来近似建模,训练目标基本上就是$-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)$或其简单变体。当$\boldsymbol{x}_0$是连续型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$一般就取条件正态分布;当$\boldsymbol{x}_0$是离散型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$可以选择自回归模型或者非自回归模型。

最近评论