






7
Oct
深度学习中的Lipschitz约束:泛化与生成模型
By 苏剑林 | 2018-10-07 | 163978位读者 | 引用前言:去年写过一篇WGAN-GP的入门读物《互怼的艺术:从零直达WGAN-GP》,提到通过梯度惩罚来为WGAN的判别器增加Lipschitz约束(下面简称“L约束”)。前几天遐想时再次想到了WGAN,总觉得WGAN的梯度惩罚不够优雅,后来也听说WGAN在条件生成时很难搞(因为不同类的随机插值就开始乱了...),所以就想琢磨一下能不能搞出个新的方案来给判别器增加L约束。
闭门造车想了几天,然后发现想出来的东西别人都已经做了,果然是只有你想不到,没有别人做不到。主要包含在这两篇论文中:《Spectral Norm Regularization for Improving the Generalizability of Deep Learning》和《Spectral Normalization for Generative Adversarial Networks》。
所以这篇文章就按照自己的理解思路,对L约束相关的内容进行简单的介绍。注意本文的主题是L约束,并不只是WGAN。它可以用在生成模型中,也可以用在一般的监督学习中。
L约束与泛化
扰动敏感
记输入为$x$,输出为$y$,模型为$f$,模型参数为$w$,记为
$$\begin{equation}y = f_w(x)\end{equation}$$
很多时候,我们希望得到一个“稳健”的模型。何为稳健?一般来说有两种含义,一是对于参数扰动的稳定性,比如模型变成了$f_{w+\Delta w}(x)$后是否还能达到相近的效果?如果在动力学系统中,还要考虑模型最终是否能恢复到$f_w(x)$;二是对于输入扰动的稳定性,比如输入从$x$变成了$x+\Delta x$后,$f_w(x+\Delta x)$是否能给出相近的预测结果。读者或许已经听说过深度学习模型存在“对抗攻击样本”,比如图片只改变一个像素就给出完全不一样的分类结果,这就是模型对输入过于敏感的案例。
10
Dec
BiGAN-QP:简单清晰的编码&生成模型
By 苏剑林 | 2018-12-10 | 71468位读者 | 引用前不久笔者通过直接在对偶空间中分析的思路,提出了一个称为GAN-QP的对抗模型框架,它的特点是可以从理论上证明既不会梯度消失,又不需要L约束,使得生成模型的搭建和训练都得到简化。
GAN-QP是一个对抗框架,所以理论上原来所有的GAN任务都可以往上面试试。前面《不用L约束又不会梯度消失的GAN,了解一下?》一文中我们只尝试了标准的随机生成任务,而这篇文章中我们尝试既有生成器、又有编码器的情况:BiGAN-QP。
BiGAN与BiGAN-QP
注意这是BiGAN,不是前段时间很火的BigGAN,BiGAN是双向GAN(Bidirectional GAN),提出于《Adversarial feature learning》一文,同期还有一篇非常相似的文章叫做《Adversarially Learned Inference》,提出了叫做ALI的模型,跟BiGAN差不多。总的来说,它们都是往普通的GAN模型中加入了编码器,使得模型既能够具有普通GAN的随机生成功能,又具有编码器的功能,可以用来提取有效的特征。把GAN-QP这种对抗模式用到BiGAN中,就得到了BiGAN-QP。
话不多说,先来上效果图(左边是原图,右边是重构):

BiGAN-QP重构效果图
26
Feb
非对抗式生成模型GLANN的简单介绍
By 苏剑林 | 2019-02-26 | 73948位读者 | 引用前段时间看到facebook发表了一个非对抗的生成模型GLANN(去年12月挂在arxiv上),号称用非对抗的方式也能生成1024的高清人脸,于是饶有兴致地阅读了一番,确实有点收获,但也有点失望。至于为啥失望,大家阅读下去就明白了。
原论文:《Non-Adversarial Image Synthesis with Generative Latent Nearest Neighbors》
机器之心介绍:《为什么让GAN一家独大?Facebook提出非对抗式生成方法GLANN》
效果图:

GLANN效果图
10
May
能量视角下的GAN模型(三):生成模型=能量模型
By 苏剑林 | 2019-05-10 | 59211位读者 | 引用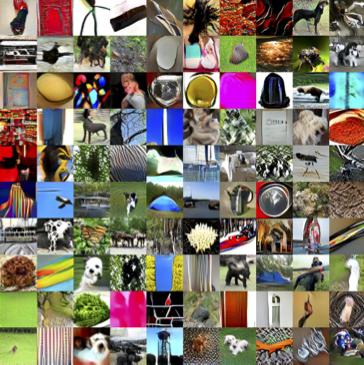
本文的模型在ImageNet(128x128)上的条件生成效果
今天要介绍的结果还是跟能量模型相关,来自论文《Implicit Generation and Generalization in Energy-Based Models》。当然,它已经跟GAN没有什么关系了,但是跟本系列第二篇所介绍的能量模型关系较大,所以还是把它放到这个系列好了。
我当初留意到这篇论文,是因为机器之心的报导《MIT本科学神重启基于能量的生成模型,新框架堪比GAN》,但是说实在的,这篇文章没什么意思,说句不中听的,就是炒冷饭系列,媒体的标题也算中肯,是“重启”。这篇文章就是指出能量模型实际上就是某个特定的Langevin方程的静态解,然后就用这个Langevin方程来实现采样,有了采样过程也就可以完成能量模型的训练,这些理论都是现成的,所以这个过程我在学习随机微分方程的时候都想过,我相信很多人也都想过。因此,我觉得作者的贡献就是把这个直白的想法通过一系列炼丹技巧实现了。
但不管怎样,能训练出来也是一件很不错的事情,另外对于之前没了解过相关内容的读者来说,这确实也算是一个不错的能量模型案例,所以我论文的整体思路整理一下,让读者能够更全面地理解能量模型。
31
Oct
从去噪自编码器到生成模型
By 苏剑林 | 2019-10-31 | 121536位读者 | 引用在我看来,几大顶会之中,ICLR的论文通常是最有意思的,因为它们的选题和风格基本上都比较轻松活泼、天马行空,让人有脑洞大开之感。所以,ICLR 2020的投稿论文列表出来之后,我也抽时间粗略过了一下这些论文,确实发现了不少有意思的工作。
其中,我发现了两篇利用去噪自编码器的思想做生成模型的论文,分别是《Learning Generative Models using Denoising Density Estimators》和《Annealed Denoising Score Matching: Learning Energy-Based Models in High-Dimensional Spaces》。由于常规做生成模型的思路我基本都有所了解,所以这种“别具一格”的思路就引起了我的兴趣。细读之下,发现两者的出发点是一致的,但是具体做法又有所不同,最终的落脚点又是一样的,颇有“一题多解”的美妙,遂将这两篇论文放在一起,对比分析一翻。
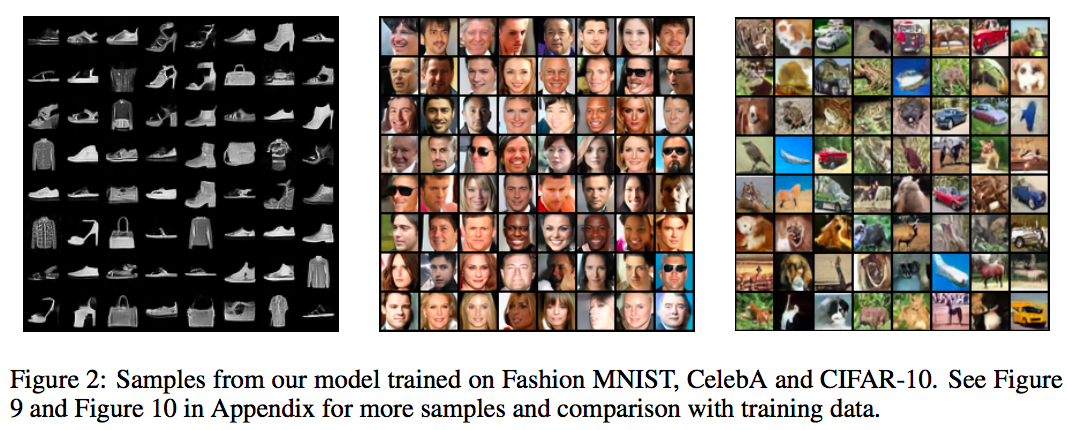
fashion mnist、CelebA、cifar10上的生成效果
20
Apr
EAE:自编码器 + BN + 最大熵 = 生成模型
By 苏剑林 | 2020-04-20 | 65243位读者 | 引用生成模型一直是笔者比较关注的主题,不管是NLP和CV的生成模型都是如此。这篇文章里,我们介绍一个新颖的生成模型,来自论文《Batch norm with entropic regularization turns deterministic autoencoders into generative models》,论文中称之为EAE(Entropic AutoEncoder)。它要做的事情给变分自编码器(VAE)基本一致,最终效果其实也差不多(略优),说它新颖并不是它生成效果有多好,而是思路上的新奇,颇有别致感。此外,借着这个机会,我们还将学习一种统计量的估计方法——$k$邻近方法,这是一种很有用的非参数估计方法。
自编码器vs生成模型
普通的自编码器是一个“编码-解码”的重构过程,如下图所示:
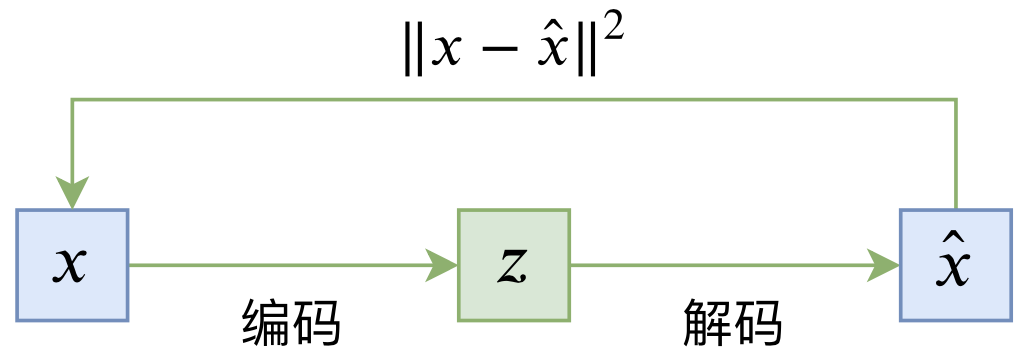
典型自编码器示意图
其loss一般为
\begin{equation}L_{AE} = \mathbb{E}_{x\sim \tilde{p}(x)}\left[\left\Vert x - \hat{x}\right\Vert^2\right] = \mathbb{E}_{x\sim \tilde{p}(x)}\left[\left\Vert x - D(E(x))\right\Vert^2\right]\end{equation}
18
May
鱼与熊掌兼得:融合检索和生成的SimBERT模型
By 苏剑林 | 2020-05-18 | 328985位读者 | 引用前段时间我们开放了一个名为SimBERT的模型权重,它是以Google开源的BERT模型为基础,基于微软的UniLM思想设计了融检索与生成于一体的任务,来进一步微调后得到的模型,所以它同时具备相似问生成和相似句检索能力。不过当时除了放出一个权重文件和示例脚本之外,未对模型原理和训练过程做进一步说明。在这篇文章里,我们来补充这部分内容。
UniLM
UniLM是一个融合NLU和NLG能力的Transformer模型,由微软在去年5月份提出来的,今年2月份则升级到了v2版本。我们之前的文章《从语言模型到Seq2Seq:Transformer如戏,全靠Mask》就简单介绍过UniLM,并且已经集成到了bert4keras中。
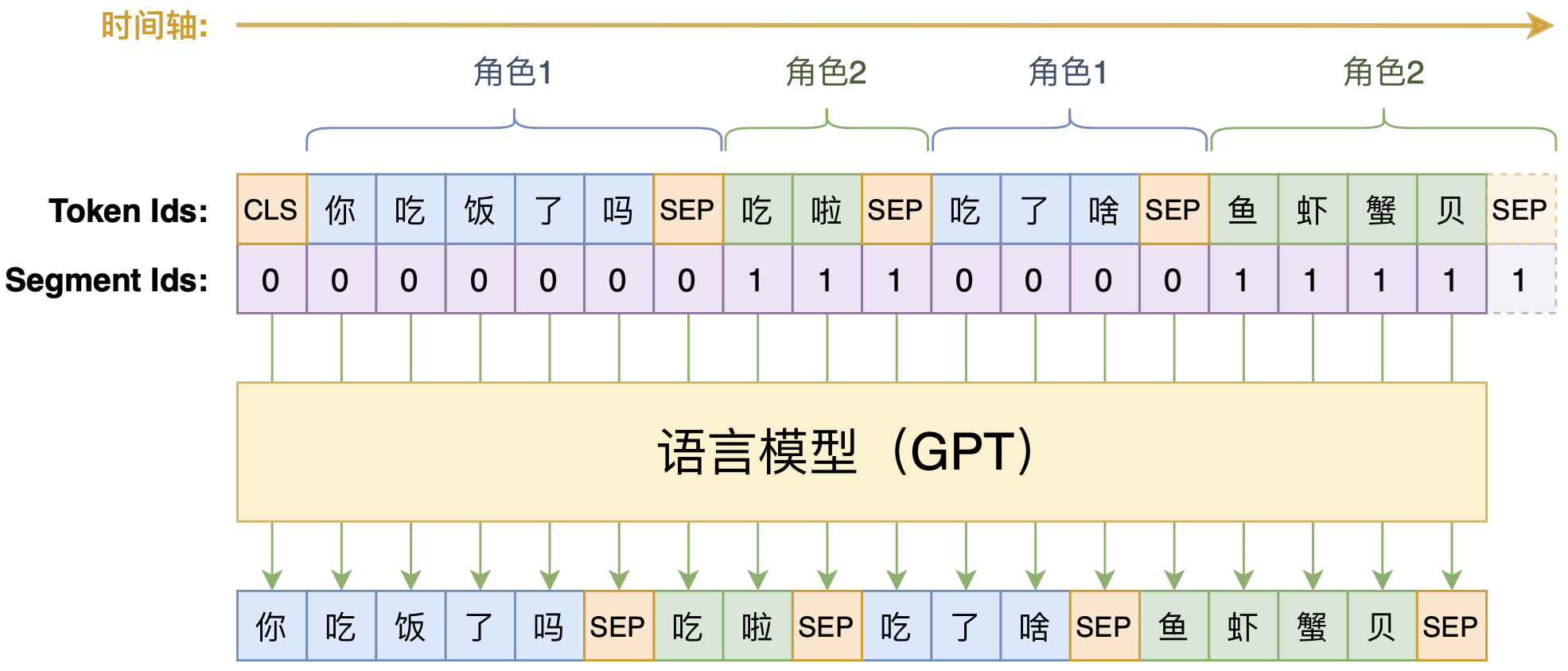
UniLM的核心是通过特殊的Attention Mask来赋予模型具有Seq2Seq的能力。假如输入是“你想吃啥”,目标句子是“白切鸡”,那UNILM将这两个句子拼成一个:[CLS] 你 想 吃 啥 [SEP] 白 切 鸡 [SEP],然后接如图的Attention Mask:
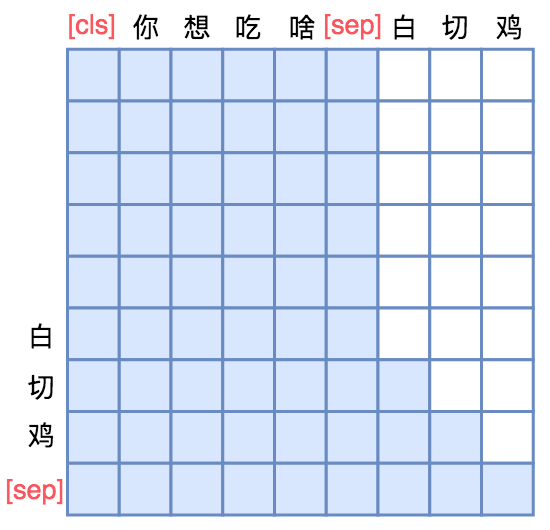
UniLM的Mask
7
Sep

最近评论