






19
Jul
通过互信息思想来缓解类别不平衡问题
By 苏剑林 | 2020-07-19 | 173200位读者 | 引用类别不平衡问题,也叫“长尾问题”,是机器学习面临的常见问题之一,尤其是来源于真实场景下的数据集,几乎都是类别不平衡的。大概在两年前,笔者也思考过这个问题,当时正好对“互信息”相关的内容颇有心得,所以构思了一种基于互信息思想的解决办法,但又想了一下,那思路似乎过于平凡,所以就没有深究。然而,前几天在arxiv上刷到Google的一篇文章《Long-tail learning via logit adjustment》,意外地发现里边包含了跟笔者当初的构思几乎一样的方法,这才意识到当初放弃的思路原来还能达到SOTA的水平~于是结合这篇论文,将笔者当初的构思过程整理于此,希望不会被读者嫌弃“马后炮”。
问题描述
这里主要关心的是单标签的多分类问题,假设有$1,2,\cdots,K$共$K$个候选类别,训练数据为$(x,y)\sim\mathcal{D}$,建模的分布为$p_{\theta}(y|x)$,那么我们的优化目标是最大似然,或者说最小化交叉熵,即
\begin{equation}\mathop{\text{argmin}}_{\theta}\,\mathbb{E}_{(x,y)\sim\mathcal{D}}[-\log p_{\theta}(y|x)]\end{equation}
31
Jul
我们真的需要把训练集的损失降低到零吗?
By 苏剑林 | 2020-07-31 | 72595位读者 | 引用在训练模型的时候,我们需要损失函数一直训练到0吗?显然不用。一般来说,我们是用训练集来训练模型,但希望的是验证集的损失越小越好,而正常来说训练集的损失降低到一定值后,验证集的损失就会开始上升,因此没必要把训练集的损失降低到0。
既然如此,在已经达到了某个阈值之后,我们可不可以做点别的事情来提升模型性能呢?ICML 2020的论文《Do We Need Zero Training Loss After Achieving Zero Training Error?》回答了这个问题。不过论文的回答也仅局限在“是什么”这个层面上,并没很好地描述“为什么”,另外看了知乎上kid丶大佬的解读,也没找到自己想要的答案。因此自己分析了一下,记录在此。
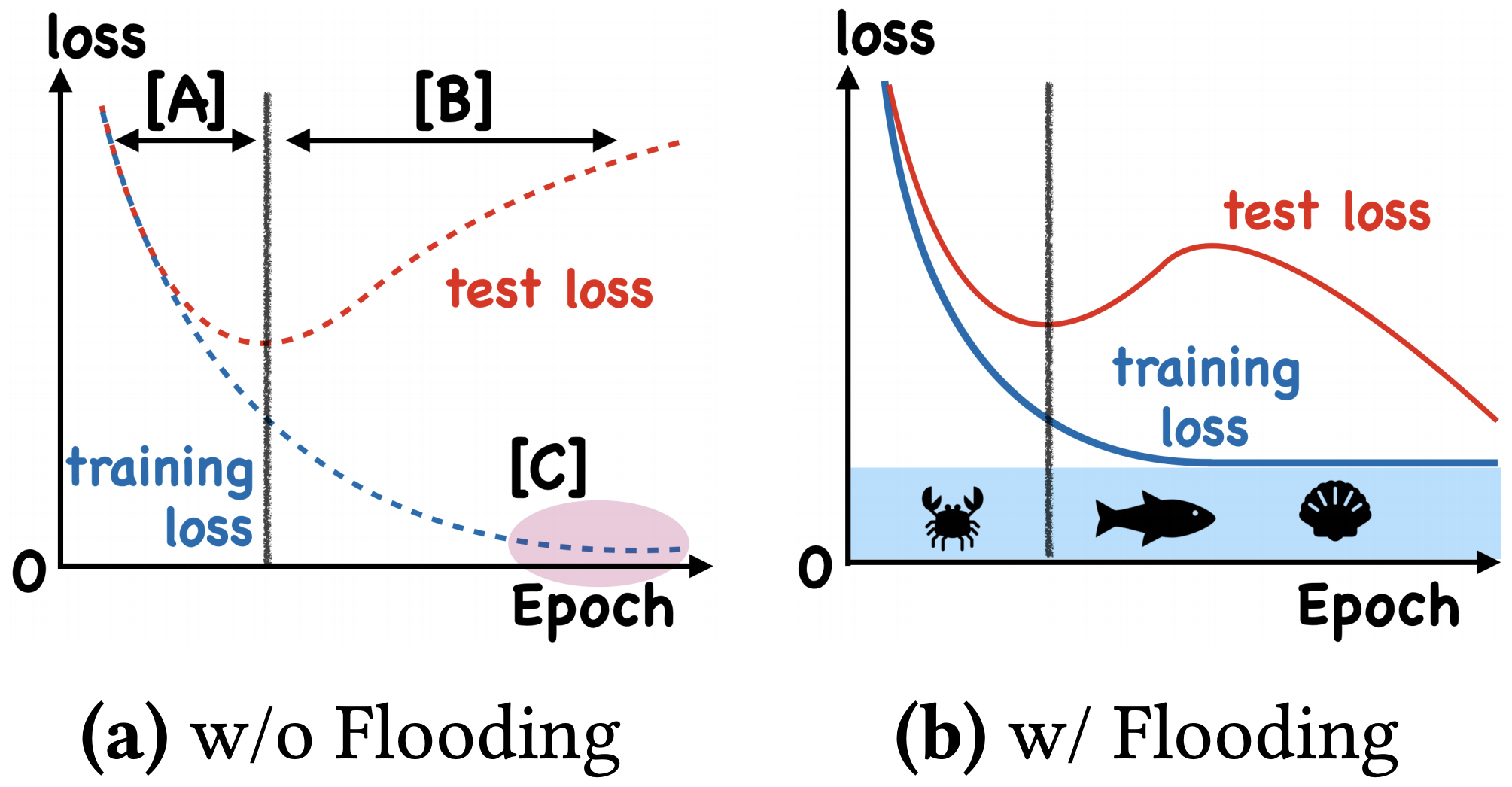
左图:不加Flooding的训练示意图;右图:加了Flooding的训练示意图
14
Aug
L2正则没有想象那么好?可能是“权重尺度偏移”惹的祸
By 苏剑林 | 2020-08-14 | 38381位读者 | 引用L2正则是机器学习常用的一种防止过拟合的方法(应该也是一道经常遇到的面试题)。简单来说,它就是希望权重的模长尽可能小一点,从而能抵御的扰动多一点,最终提高模型的泛化性能。但是读者可能也会发现,L2正则的表现通常没有理论上说的那么好,很多时候加了可能还有负作用。最近的一篇文章《Improve Generalization and Robustness of Neural Networks via Weight Scale Shifting Invariant Regularizations》从“权重尺度偏移”这个角度分析了L2正则的弊端,并提出了新的WEISSI正则项。整个分析过程颇有意思,在这里与大家分享一下。
相关内容
这一节中我们先简单回顾一下L2正则,然后介绍它与权重衰减的联系以及与之相关的AdamW优化器。
L2正则的理解
为什么要添加L2正则?这个问题可能有多个答案。有从Ridge回归角度回答的,有从贝叶斯推断角度回答的,这里给出从扰动敏感性的角度的理解。
31
Aug
再谈类别不平衡问题:调节权重与魔改Loss的对比联系
By 苏剑林 | 2020-08-31 | 84822位读者 | 引用类别不平衡问题,也称为长尾分布问题,在本博客里已经有好几次相关讨论了,比如《从loss的硬截断、软化到focal loss》、《将“Softmax+交叉熵”推广到多标签分类问题》、《通过互信息思想来缓解类别不平衡问题》。对于缓解类别不平衡,比较基本的方法就是调节样本权重,看起来“高端”一点的方法则是各种魔改loss了(比如Focal Loss、Dice Loss、Logits Adjustment等),本文希望比较系统地理解一下它们之间的联系。

长尾分布:少数类别的样本数目非常多,多数类别的样本数目非常少。
从光滑准确率到交叉熵
这里的分析主要以sigmoid的2分类为主,但多数结论可以平行推广到softmax的多分类。设$x$为输入,$y\in\{0,1\}$为目标,$p_{\theta}(x) \in [0, 1]$为模型。理想情况下,当然是要评测什么指标,我们就去优化那个指标。对于分类问题来说,最朴素的指标当然就是准确率,但准确率并没有办法提供有效的梯度,所以不能直接来训练。
19
Oct
BERT可以上几年级了?Seq2Seq“硬刚”小学数学应用题
By 苏剑林 | 2020-10-19 | 73438位读者 | 引用
“鸡兔同笼”的那些年
“盈亏问题”、“年龄问题”、“植树问题”、“牛吃草问题”、“利润问题”...,小学阶段你是否曾被各种花样的数学应用题折磨过呢?没关系,现在机器学习模型也可以帮助我们去解答应用题了,来看看它可以上几年级了?
本文将给出一个求解小学数学应用题(Math Word Problem)的baseline,基于ape210k数据集训练,直接用Seq2Seq模型生成可执行的数学表达式,最终Large版本的模型能达到75%的准确率,明显高于ape210k论文所报告的结果。所谓“硬刚”,指的是没有对表达式做特别的转换,也没有通过模板处理,就直接生成跟人类做法相近的可读表达式。
13
Nov
也来谈谈RNN的梯度消失/爆炸问题
By 苏剑林 | 2020-11-13 | 96606位读者 | 引用尽管Transformer类的模型已经攻占了NLP的多数领域,但诸如LSTM、GRU之类的RNN模型依然在某些场景下有它的独特价值,所以RNN依然是值得我们好好学习的模型。而对于RNN梯度的相关分析,则是一个从优化角度思考分析模型的优秀例子,值得大家仔细琢磨理解。君不见,诸如“LSTM为什么能解决梯度消失/爆炸”等问题依然是目前流行的面试题之一...
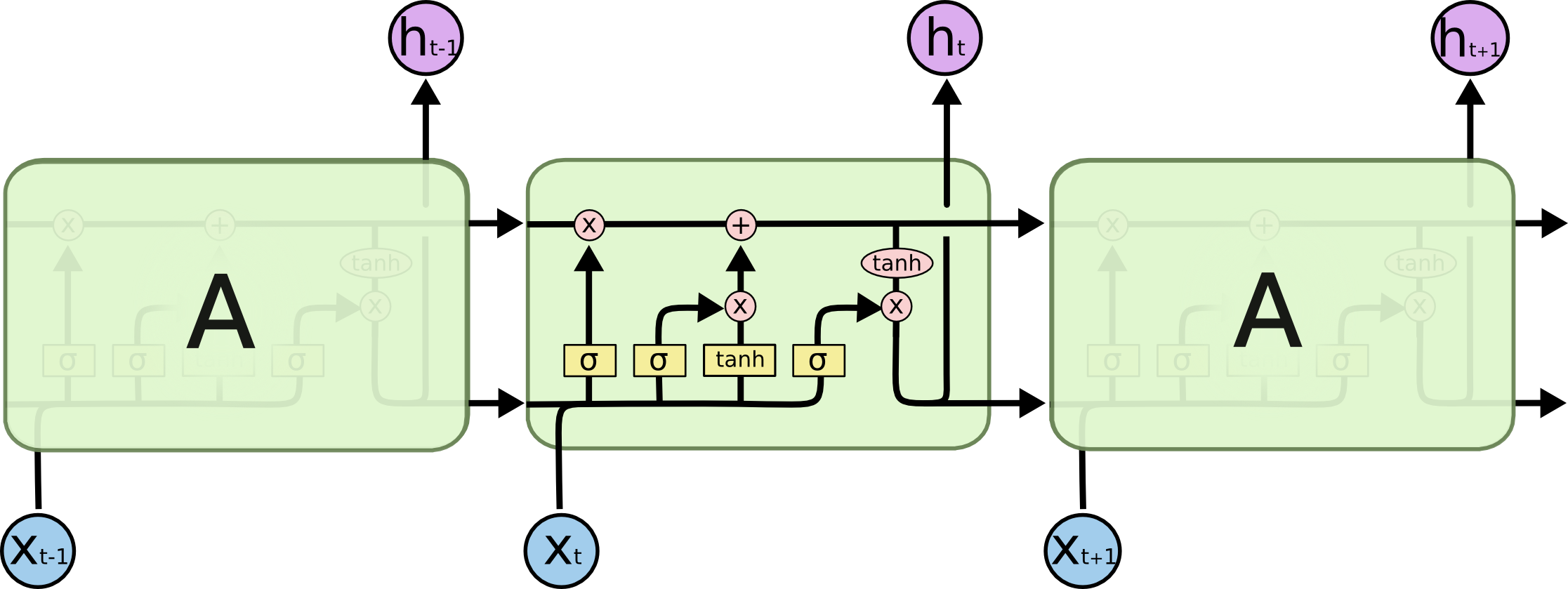
经典的LSTM
关于此类问题,已有不少网友做出过回答,然而笔者查找了一些文章(包括知乎上的部分回答、专栏以及经典的英文博客),发现没有找到比较好的答案:有些推导记号本身就混乱不堪,有些论述过程没有突出重点,整体而言感觉不够清晰自洽。为此,笔者也尝试给出自己的理解,供大家参考。
1
Jan
SPACES:“抽取-生成”式长文本摘要(法研杯总结)
By 苏剑林 | 2021-01-01 | 258808位读者 | 引用“法研杯”算是近年来比较知名的NLP赛事之一,今年是第三届,包含四个赛道,其中有一个“司法摘要”赛道引起了我们的兴趣。经过了解,这是面向法律领域裁判文书的长文本摘要生成,这应该是国内第一个公开的长文本生成任务和数据集。过去一年多以来,我们在文本生成方面都有持续的投入和探索,所以决定选择该赛道作为检验我们研究成果的“试金石”。很幸运,我们最终以微弱的优势获得了该赛道的第一名。在此,我们对我们的比赛模型做一个总结和分享。
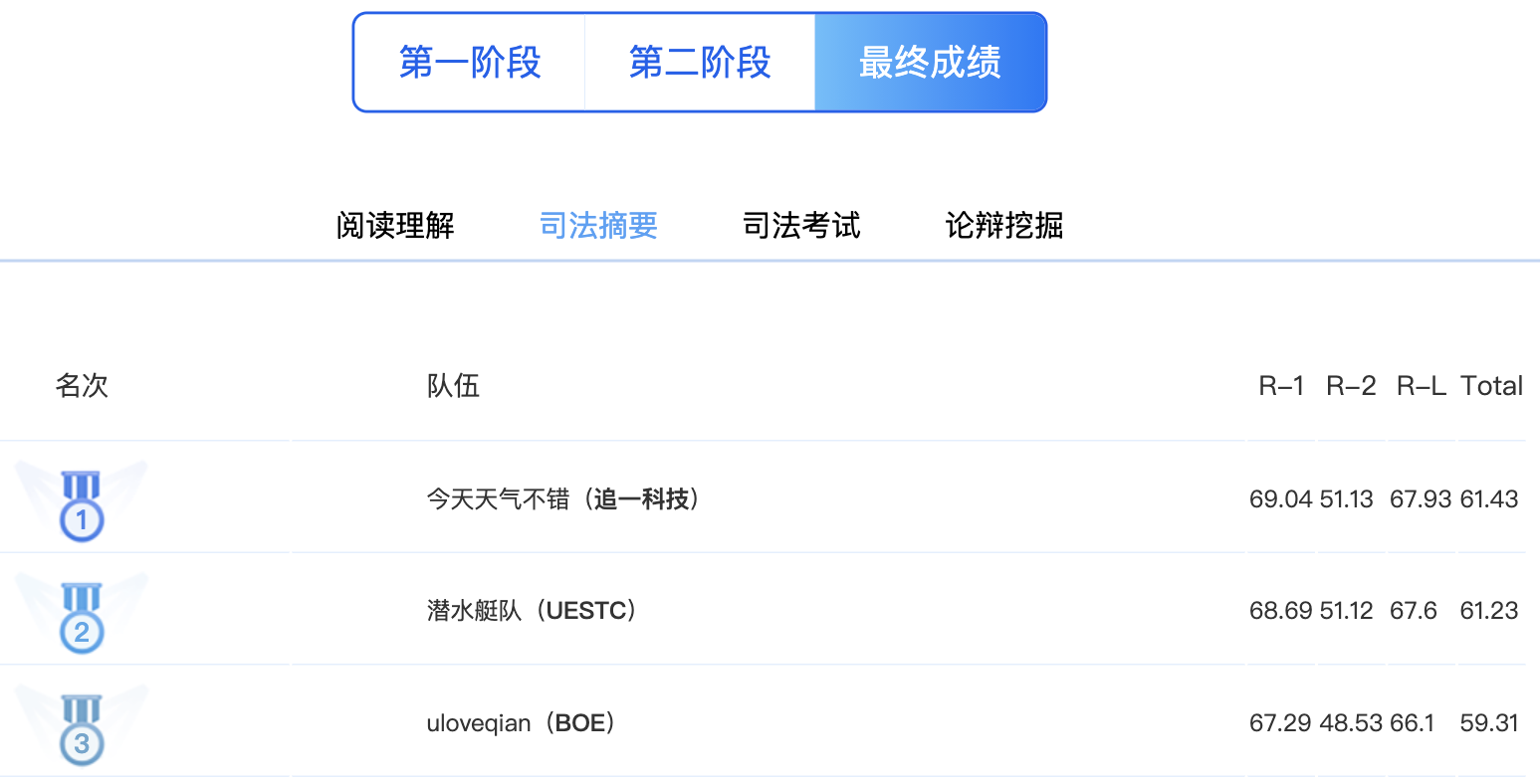
比赛榜单截图
在该比赛中,我们跳出了纯粹炼丹的过程,通过新型的Copy机制、Sparse Softmax等颇具通用性的新方法提升了模型的性能。整体而言,我们的模型比较简洁有效,而且可以做到端到端运行。窃以为我们的结果对工程和研究都有一定的参考价值。
24
Dec
RealFormer:把残差转移到Attention矩阵上面去
By 苏剑林 | 2020-12-24 | 105721位读者 | 引用大家知道Layer Normalization是Transformer模型的重要组成之一,它的用法有PostLN和PreLN两种,论文《On Layer Normalization in the Transformer Architecture》中有对两者比较详细的分析。简单来说,就是PreLN对梯度下降更加友好,收敛更快,对训练时的超参数如学习率等更加鲁棒等,反正一切都好但就有一点硬伤:PreLN的性能似乎总略差于PostLN。最近Google的一篇论文《RealFormer: Transformer Likes Residual Attention》提出了RealFormer设计,成功地弥补了这个Gap,使得模型拥有PreLN一样的优化友好性,并且效果比PostLN还好,可谓“鱼与熊掌兼得”了。
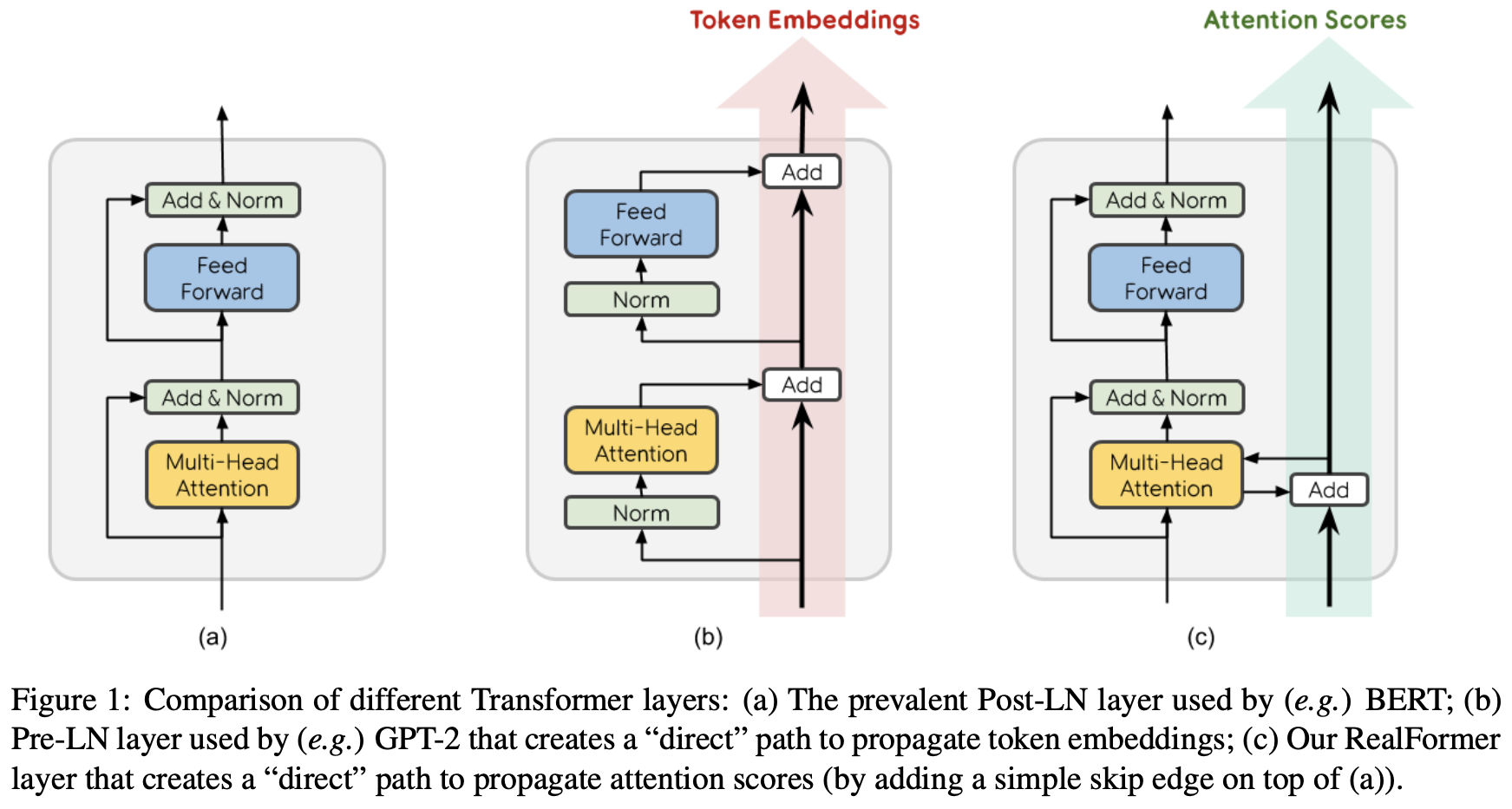
PostLN、PreLN和RealFormer结构示意图

最近评论