






8
Jan
三连杆装置曲线方程
By 苏剑林 | 2011-01-08 | 98799位读者 |本创意装置来自牧夫天文论坛的zhangyf1997同好。
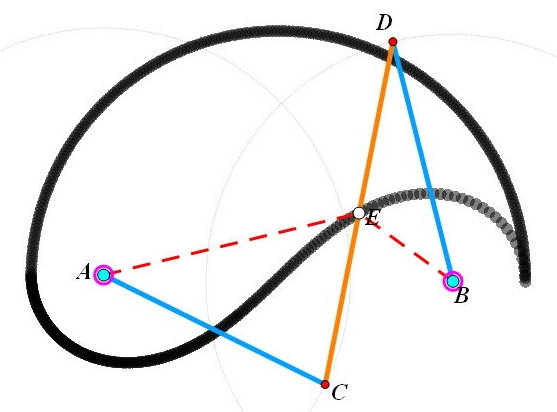
三连杆装置——“鱼”
结构:
1、A、B为两定点,可看作有刚性杆连接;
2、AC为动力杆,绕点A转动;
3、BD为从动杆,CD为连杆。
长度数据:
1、CD=AB=$\sqrt{2}$;
2、AC=BD=1。
3、E是CD中点
求:E点的轨迹方程(即图中黑色那条,很有趣吧?)
为了求出本题的曲线方程,BoJone依旧采用向量的方法,但是这一次有点特殊,采用“质点法”记号。在《绕来绕去的向量法》中,BoJone学到了一个称之为“质点法”的东西,当然也不是什么神秘的新的东西,在我看来,它就是一种向量法的简便记号,即把向量$\vec{AB}$写成$B-A$(两个点相减),并且定义$AB$就是两个向量的点积$\vec{OA}\cdot \vec{OB}$,其余都没有太大变化。只要在运算过程中记住:1、注意要使用明显的符号把“点”与“数”区分开来,不至于混淆;2、向量没有除法,不能随便在等式两边随便约去一些向量。
言归正传,在本题中,以A为原点,AB为x轴建立坐标系,可以写出:
$$\begin{aligned}B=(\sqrt{2},0) \\ 2E=C+D\end{aligned}\tag{1}$$$$1=C^2=(D-B)^2=D^2+B^2-2DB\tag{2}$$$$2=B^2=(D-C)^2=D^2+C^2-2DC\tag{3}$$
由(1)得$C=2E-D$,两端平方得
$$1=4E^2+D^2-4DE\tag{4}$$
将$C=2E-D$代入(3)得$$1=D^2-2D(2E-D)=3D^2-4ED\tag{5}$$
联合(4)(5)得到$2E^2=D^2$,将其代入(5)得到$1=6E^2-4ED$,代入(2)得$2DB=1+2E^2$。至此,向量的工作完成了,接下来我们只有回到坐标系了(向量已经帮助我们将问题化简成一元一次方程组了)。设$E=(x,y),D=(D_1,D_2)$,那么有
$$\begin{aligned}6(x^2+y^2)-1=4D_1 x+4D_2 y \\ 1+2(x^2+y^2)=2\sqrt{2} D_1\end{aligned}$$
解得到$D_1=\frac{1+2(x^2+y^2)}{2\sqrt{2}},D_2=\frac{6(x^2+y^2)-1-4D_1 x}{4y}$
由$2E^2=D^2$得$2(x^2+y^2)=D_1^2+D_2^2$,将上面解得的$D_1,D_2$代入后化简即得轨迹方程,这是一个极度复杂的过程..
$$2(x^2+y^2)=(\frac{1+2(x^2+y^2)}{2\sqrt{2}})^2+(\frac{6(x^2+y^2)-1-4(\frac{1+2(x^2+y^2)}{2\sqrt{2}}) x}{4y})^2$$
一个比较“简单”的展开结果为:
$$\begin{aligned}8 x^6-24 \sqrt{2} x^5+24 x^4 y^2+44 x^4-48 \sqrt{2} x^3 y^2-8 \sqrt{2} x^3+24 x^2 y^4+56 x^2 y^2-10 x^2-24 \sqrt{2} x y^4-8 \sqrt{2} x y^2 \\ +2 \sqrt{2} x+8 y^6+12 y^4-10 y^2+1=0\end{aligned}$$
想不到居然是一个六次曲线!不过,还可以稍稍化简一些,这个曲线由两部分组成:
$$\begin{aligned}2y^2 +2 x^2= 2 \sqrt(2) x+1 \\ 4(y^2+x^2+1-\sqrt{2} x)^2=8 x^2-8 \sqrt{2} x+5\end{aligned}$$
由于运算过程实在太过复杂,就连我这个很喜欢手算的人也不想算下去,因此,这些结果都是wolframalpha完成的。
有读者能够提供更简单的方法的话,欢迎告知BoJone。
转载到请包括本文地址:https://kexue.fm/archives/1168
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jan. 08, 2011). 《三连杆装置曲线方程 》[Blog post]. Retrieved from https://kexue.fm/archives/1168
@online{kexuefm-1168,
title={三连杆装置曲线方程},
author={苏剑林},
year={2011},
month={Jan},
url={\url{https://kexue.fm/archives/1168}},
}

January 10th, 2011
阴阳鱼
January 11th, 2011
你说这些结果都是wolframalpha完成的,我很好奇你是怎么做的,怎样让那个网站帮你运算。
类似于Google计算器吧。
January 14th, 2011
看来确实是双纽线……
January 29th, 2011
在几何画板里面动一动该能弄出这个图案.
可我失败了
我是该装置的作者喔,你到牧夫天文论坛去看看,应该能下载到那个装置的几何画板文件的。
不过貌似听数研论坛说,这个轨迹似乎有误,正确的轨迹应该是一个8字形。
January 29th, 2011
能否不用向量来解啊?
可以,根据定义:双纽线是到两定点距离乘积为常数的曲线。详见:http://bbs.emath.ac.cn/thread-2886-1-1.html
April 24th, 2013
我觉得解法有误。在x轴下方应该是个圆(因为其组成了一个平行四边形),在x轴上方构成了两个全等三角形,轨迹等我想一想啊。
应该以AB的中点做为坐标原点会另化简曲线方程,待我推导一下再发表出来。
好好好,欢迎大家相互发表看法^_^期待
我手算了几天,得不到解法,只能得到一些有意义的结果,如果你能看到我的邮箱的话,请给我发邮件,我将图片发给你。
在这个论坛,我不知道怎么发图片。
最后说一下:你的解答过程很可能是正确的,起码来说从外形上来看是对的。我有三维绘图软件SolidWorks,能用草图功能演示它的轨迹。
在blog的评论是不能发图片的。
我已经给你发了邮件。
SolidWorks没用过,我也试一下。
May 19th, 2014
$x^4+y^2+y^4+x^2 (-1+2 y^2)=0$