






19
Mar
为什么需要残差?一个来自DeepNet的视角
By 苏剑林 | 2022-03-19 | 93889位读者 | 引用在《训练1000层的Transformer究竟有什么困难?》中我们介绍了微软提出的能训练1000层Transformer的DeepNet技术。而对于DeepNet,读者一般也有两种反应,一是为此感到惊叹而点赞,另一则是觉得新瓶装旧酒没意思。出现后一种反应的读者,往往是因为DeepNet所提出的两个改进点——增大恒等路径权重和降低残差分支初始化——实在过于稀松平常,并且其他工作也出现过类似的结论,因此很难有什么新鲜感。
诚然,单从结论来看,DeepNet实在算不上多有意思,但笔者觉得,DeepNet的过程远比结论更为重要,它有意思的地方在于提供了一个简明有效的梯度量级分析思路,并可以用于分析很多相关问题,比如本文要讨论的“为什么需要残差”,它就可以给出一个比较贴近本质的答案。
增量爆炸
为什么需要残差?答案是有了残差才更好训练深层模型,这里的深层可能是百层、千层甚至万层。那么问题就变成了为什么没有残差就不容易训练深层模型呢?
14
Feb
多任务学习漫谈(三):分主次之序
By 苏剑林 | 2022-02-14 | 54167位读者 | 引用多任务学习是一个很宽泛的命题,不同场景下多任务学习的目标不尽相同。在《多任务学习漫谈(一):以损失之名》和《多任务学习漫谈(二):行梯度之事》中,我们将多任务学习的目标理解为“做好每一个任务”,具体表现是“尽量平等地处理每一个任务”,我们可以称之为“平行型多任务学习”。然而,并不是所有多任务学习的目标都是如此,在很多场景下,我们主要还是想学好某一个主任务,其余任务都只是辅助,希望通过增加其他任务的学习来提升主任务的效果罢了,此类场景我们可以称为“主次型多任务学习”。
在这个背景下,如果还是沿用平行型多任务学习的“做好每一个任务”的学习方案,那么就可能会明显降低主任务的效果了。所以本文继续沿着“行梯度之事”的想法,探索主次型多任务学习的训练方案。
目标形式
在这篇文章中,我们假设读者已经阅读并且基本理解《多任务学习漫谈(二):行梯度之事》里边的思想和方法,那么在梯度视角下,让某个损失函数保持下降的必要条件是更新量与其梯度夹角至少大于90度,这是贯穿全文的设计思想。
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 75977位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。
18
Jan
多任务学习漫谈(一):以损失之名
By 苏剑林 | 2022-01-18 | 235078位读者 | 引用能提升模型性能的方法有很多,多任务学习(Multi-Task Learning)也是其中一种。简单来说,多任务学习是希望将多个相关的任务共同训练,希望不同任务之间能够相互补充和促进,从而获得单任务上更好的效果(准确率、鲁棒性等)。然而,多任务学习并不是所有任务堆起来就能生效那么简单,如何平衡每个任务的训练,使得各个任务都尽量获得有益的提升,依然是值得研究的课题。
最近,笔者机缘巧合之下,也进行了一些多任务学习的尝试,借机也学习了相关内容,在此挑部分结果与大家交流和讨论。
加权求和
从损失函数的层面看,多任务学习就是有多个损失函数$\mathcal{L}_1,\mathcal{L}_2,\cdots,\mathcal{L}_n$,一般情况下它们有大量的共享参数、少量的独立参数,而我们的目标是让每个损失函数都尽可能地小。为此,我们引入权重$\alpha_1,\alpha_2,\cdots,\alpha_n\geq 0$,通过加权求和的方式将它转化为如下损失函数的单任务学习
\begin{equation}\mathcal{L} = \sum_{i=1}^n \alpha_i \mathcal{L}_i\label{eq:w-loss}\end{equation}
在这个视角下,多任务学习的主要难点就是如何确定各个$\alpha_i$了。
13
Nov
也来谈谈RNN的梯度消失/爆炸问题
By 苏剑林 | 2020-11-13 | 124759位读者 | 引用尽管Transformer类的模型已经攻占了NLP的多数领域,但诸如LSTM、GRU之类的RNN模型依然在某些场景下有它的独特价值,所以RNN依然是值得我们好好学习的模型。而对于RNN梯度的相关分析,则是一个从优化角度思考分析模型的优秀例子,值得大家仔细琢磨理解。君不见,诸如“LSTM为什么能解决梯度消失/爆炸”等问题依然是目前流行的面试题之一...
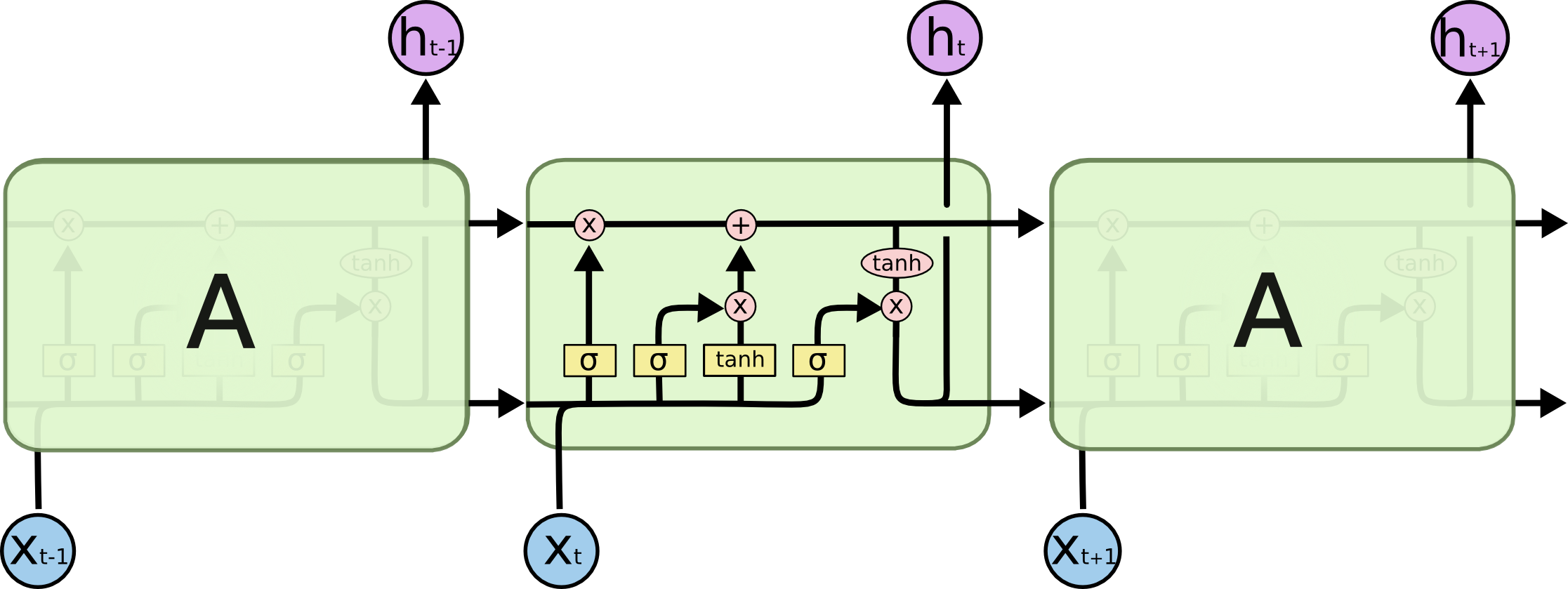
经典的LSTM
关于此类问题,已有不少网友做出过回答,然而笔者查找了一些文章(包括知乎上的部分回答、专栏以及经典的英文博客),发现没有找到比较好的答案:有些推导记号本身就混乱不堪,有些论述过程没有突出重点,整体而言感觉不够清晰自洽。为此,笔者也尝试给出自己的理解,供大家参考。
14
Aug
L2正则没有想象那么好?可能是“权重尺度偏移”惹的祸
By 苏剑林 | 2020-08-14 | 48539位读者 | 引用L2正则是机器学习常用的一种防止过拟合的方法(应该也是一道经常遇到的面试题)。简单来说,它就是希望权重的模长尽可能小一点,从而能抵御的扰动多一点,最终提高模型的泛化性能。但是读者可能也会发现,L2正则的表现通常没有理论上说的那么好,很多时候加了可能还有负作用。最近的一篇文章《Improve Generalization and Robustness of Neural Networks via Weight Scale Shifting Invariant Regularizations》从“权重尺度偏移”这个角度分析了L2正则的弊端,并提出了新的WEISSI正则项。整个分析过程颇有意思,在这里与大家分享一下。
相关内容
这一节中我们先简单回顾一下L2正则,然后介绍它与权重衰减的联系以及与之相关的AdamW优化器。
L2正则的理解
为什么要添加L2正则?这个问题可能有多个答案。有从Ridge回归角度回答的,有从贝叶斯推断角度回答的,这里给出从扰动敏感性的角度的理解。
31
Jul
我们真的需要把训练集的损失降低到零吗?
By 苏剑林 | 2020-07-31 | 99484位读者 | 引用在训练模型的时候,我们需要损失函数一直训练到0吗?显然不用。一般来说,我们是用训练集来训练模型,但希望的是验证集的损失越小越好,而正常来说训练集的损失降低到一定值后,验证集的损失就会开始上升,因此没必要把训练集的损失降低到0。
既然如此,在已经达到了某个阈值之后,我们可不可以做点别的事情来提升模型性能呢?ICML 2020的论文《Do We Need Zero Training Loss After Achieving Zero Training Error?》回答了这个问题。不过论文的回答也仅局限在“是什么”这个层面上,并没很好地描述“为什么”,另外看了知乎上kid丶大佬的解读,也没找到自己想要的答案。因此自己分析了一下,记录在此。
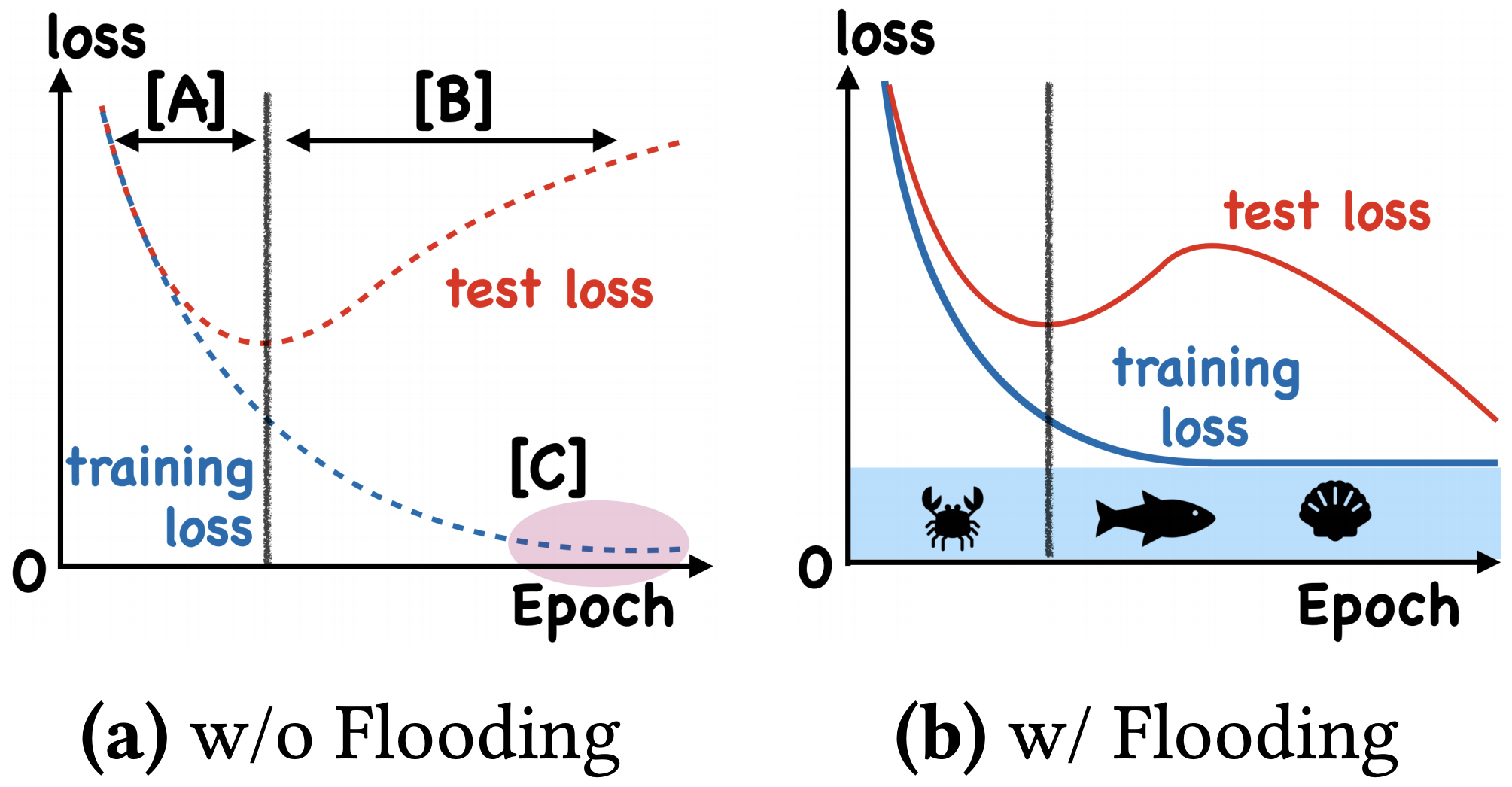
左图:不加Flooding的训练示意图;右图:加了Flooding的训练示意图
29
Apr
节省显存的重计算技巧也有了Keras版了
By 苏剑林 | 2020-04-29 | 62764位读者 | 引用不少读者最近可能留意到了公众号文章《BERT重计算:用22.5%的训练时间节省5倍的显存开销(附代码)》,里边介绍了一个叫做“重计算”的技巧,简单来说就是用来省显存的方法,让平均训练速度慢一点,但batch_size可以增大好几倍。该技巧首先发布于论文《Training Deep Nets with Sublinear Memory Cost》,其实在2016年就已经提出了,只不过似乎还没有特别流行起来。
探索
公众号文章提到该技巧在pytorch和paddlepaddle都有原生实现了,但tensorflow还没有。但事实上从tensorflow 1.8开始,tensorflow就已经自带了该功能了,当时被列入了tf.contrib这个子库中,而从tensorflow 1.15开始,它就被内置为tensorflow的主函数之一,那就是tf.recompute_grad。
找到tf.recompute_grad之后,笔者就琢磨了一下它的用法,经过一番折腾,最终居然真的成功地用起来了,居然成功地让batch_size从48增加到了144!然而,在继续整理测试的过程中,发现这玩意居然在tensorflow 2.x是失效的...于是再折腾了两天,查找了各种资料并反复调试,最终算是成功地补充了这一缺陷。
最后是笔者自己的开源实现:
该实现已经内置在bert4keras中,使用bert4keras的读者可以升级到最新版本(0.7.5+)来测试该功能。

最近评论