






30
Nov
用热传导方程来指导自监督学习
By 苏剑林 | 2022-11-30 | 35914位读者 | 引用用理论物理来卷机器学习已经不是什么新鲜事了,比如上个月介绍的《生成扩散模型漫谈(十三):从万有引力到扩散模型》就是经典一例。最近一篇新出的论文《Self-Supervised Learning based on Heat Equation》,顾名思义,用热传导方程来做(图像领域的)自监督学习,引起了笔者的兴趣。这种物理方程如何在机器学习中发挥作用?同样的思路能否迁移到NLP中?让我们一起来读读论文。
基本方程
如下图,左边是物理中热传导方程的解,右端则是CAM、积分梯度等显著性方法得到的归因热力图,可以看到两者有一定的相似之处,于是作者认为热传导方程可以作为好的视觉特征的一个重要先验。
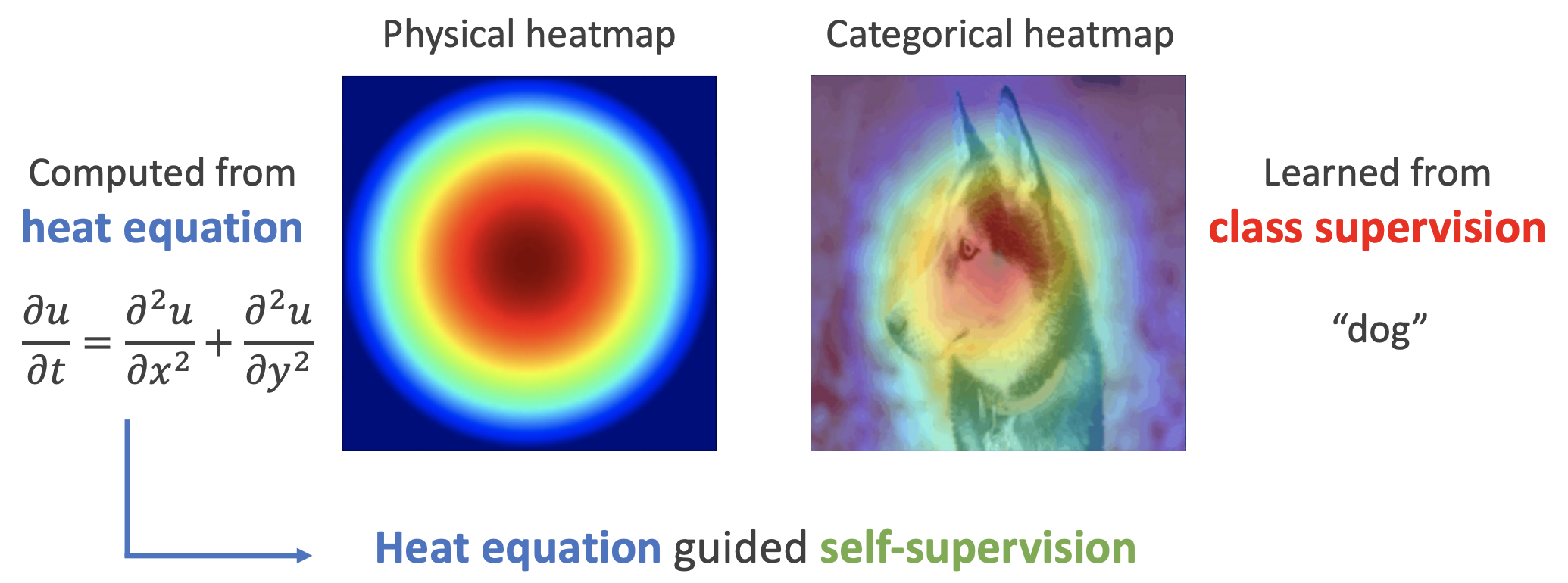
热方程的热力图(左)和视觉模型的热力图(右)
15
Dec
生成扩散模型漫谈(十四):构建ODE的一般步骤(上)
By 苏剑林 | 2022-12-15 | 69897位读者 | 引用书接上文,在《生成扩散模型漫谈(十三):从万有引力到扩散模型》中,我们介绍了一个由万有引力启发的、几何意义非常清晰的ODE式生成扩散模型。有的读者看了之后就疑问:似乎“万有引力”并不是唯一的选择,其他形式的力是否可以由同样的物理绘景构建扩散模型?另一方面,该模型在物理上确实很直观,但还欠缺从数学上证明最后确实能学习到数据分布。
本文就尝试从数学角度比较精确地回答“什么样的力场适合构建ODE式生成扩散模型”这个问题。
基础结论
要回答这个问题,需要用到在《生成扩散模型漫谈(十二):“硬刚”扩散ODE》中我们推导过的一个关于常微分方程对应的分布变化的结论。
考虑$\boldsymbol{x}_t\in\mathbb{R}^d, t\in[0,T]$的一阶(常)微分方程(组)
\begin{equation}\frac{d\boldsymbol{x}_t}{dt}=\boldsymbol{f}_t(\boldsymbol{x}_t)\label{eq:ode}\end{equation}
28
Dec
Transformer升级之路:6、旋转位置编码的完备性分析
By 苏剑林 | 2022-12-28 | 47386位读者 | 引用在去年的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中,笔者提出了旋转位置编码(RoPE),当时的出发点只是觉得用绝对位置来实现相对位置是一件“很好玩的事情”,并没料到其实际效果还相当不错,并为大家所接受,不得不说这真是一个意外之喜。后来,在《Transformer升级之路:4、二维位置的旋转式位置编码》中,笔者讨论了二维形式的RoPE,并研究了用矩阵指数表示的RoPE的一般解。
既然有了一般解,那么自然就会引出一个问题:我们常用的RoPE,只是一个以二维旋转矩阵为基本单元的分块对角矩阵,如果换成一般解,理论上效果会不会更好呢?本文就来回答这个问题。
指数通解
在《Transformer升级之路:4、二维位置的旋转式位置编码》中,我们将RoPE抽象地定义为任意满足下式的方阵
\begin{equation}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n-m}\label{eq:re}\end{equation}
8
Jun
Naive Bayes is all you need ?
By 苏剑林 | 2023-06-08 | 56152位读者 | 引用很抱歉,起了这么个具有标题党特征的题目。在写完《NBCE:使用朴素贝叶斯扩展LLM的Context处理长度》之后,笔者就觉得朴素贝叶斯(Naive Bayes)跟Attention机制有很多相同的特征,后来再推导了一下发现,Attention机制其实可以看成是一种广义的、参数化的朴素贝叶斯。既然如此,“Attention is All You Need”不也就意味着“Naive Bayes is all you need”了?这就是本文标题的缘由。
接下来笔者将介绍自己的思考过程,分析如何从朴素贝叶斯角度来理解Attention机制。
朴素贝叶斯
本文主要考虑语言模型,它要建模的是$p(x_t|x_1,\cdots,x_{t-1})$。根据贝叶斯公式,我们有
\begin{equation}p(x_t|x_1,\cdots,x_{t-1}) = \frac{p(x_1,\cdots,x_{t-1}|x_t)p(x_t)}{p(x_1,\cdots,x_{t-1})}\propto p(x_1,\cdots,x_{t-1}|x_t)p(x_t)\end{equation}
7
Aug
Transformer升级之路:12、无限外推的ReRoPE?
By 苏剑林 | 2023-08-07 | 83137位读者 | 引用自从在《Transformer升级之路:11、将β进制位置进行到底》中引入混合进制的思路进一步推广了NTK-aware Scaled RoPE后,笔者感觉类似思路的效果已经达到了上限,想要更大幅度的提升就必须另辟蹊径了。这时候笔者想起了此前构思过的一个思路,该思路由于复杂度较高所以被搁置下了,既然现在已经遇到了瓶颈,那么“唯一的办法就是最好的办法”,于是便将它重拾起来。
万万没想到的是,尽管该方法增加了一些推理复杂度,但它的实验效果却惊人地好——甚至隐约有无限的长度外推能力!因此,笔者迫不及待地撰写了本文来分享该方法。由于形式上跟ReLU激活函数的相似性,所以笔者将该方法命名为“ReRoPE (Rectified Rotary Position Embeddings)”。
重温
我们知道,RoPE形式上是一种绝对位置编码,但实际上给Attention带来的是相对位置信息,即如下的Toeplitz矩阵:
20
Mar
《为什么现在的LLM都是Decoder-only的架构?》FAQ
By 苏剑林 | 2023-03-20 | 59350位读者 | 引用上周笔者写了《为什么现在的LLM都是Decoder-only的架构?》,总结了一下我在这个问题上的一些实验结论和猜测。果然是热点问题流量大,paperweekly的转发没多久阅读量就破万了,知乎上点赞数也不少。在几个平台上,陆陆续续收到了读者的一些意见或者疑问,总结了其中一些有代表性的问题,做成了本篇FAQ,希望能进一步帮助大家解决疑惑。
回顾
在《为什么现在的LLM都是Decoder-only的架构?》中,笔者对GPT和UniLM两种架构做了对比实验,然后结合以往的研究经历,猜测了如下结论:
1、输入部分的注意力改为双向不会带来收益,Encoder-Decoder架构的优势很可能只是源于参数翻倍;
2、双向注意力没有带来收益,可能是因为双向注意力的低秩问题导致效果下降。
所以,基于这两点推测,我们得到结论:
在同等参数量、同等推理成本下,Decoder-only架构是最优选择。
18
May
基于量子化假设推导模型的尺度定律(Scaling Law)
By 苏剑林 | 2023-05-18 | 44965位读者 | 引用尺度定律(Scaling Law),指的是模型能力与模型尺度之间的渐近关系。具体来说,模型能力我们可以简单理解为模型的损失函数,模型尺度可以指模型参数量、训练数据量、训练步数等,所谓尺度定律,就是研究损失函数跟参数量、数据量、训练步数等变量的大致关系。《Scaling Laws for Neural Language Models》、《Training Compute-Optimal Large Language Models》等工作的实验结果表明,神经网络的尺度定律多数呈现“幂律(Power law)”的形式。
为什么会是幂律呢?能否从理论上解释呢?论文《The Quantization Model of Neural Scaling》基于“量子化”假设给出了一个颇为有趣的推导。本文一同来欣赏一下。
14
Jul
当生成模型肆虐:互联网将有“疯牛病”之忧?
By 苏剑林 | 2023-07-14 | 62301位读者 | 引用众所周知,不管是文本还是视觉领域,各种生成模型正在以无法阻挡的势头“肆虐”互联网。虽然大家都明白,实现真正的通用人工智能(AGI)还有很长的路要走,但这并不妨碍人们越来越频繁地利用生成模型来创作和分享内容。君不见,很多网络文章已经配上了Stable Diffusion模型生成的插图;君不见,很多新闻风格已经越来越显现出ChatGPT的影子。看似无害的这种趋势,正悄然引发了一个问题:我们是否应该对互联网上充斥的生成模型数据保持警惕?
近期发表的论文《Self-Consuming Generative Models Go MAD》揭示了一种令人担忧的可能性,那就是生成模型正在互联网上的无节制扩张,可能会导致一场数字版的“疯牛病”疫情。本文一起学习这篇论文,探讨其可能带来的影响。

最近评论