






10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 119869位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。
29
Jun
UniVAE:基于Transformer的单模型、多尺度的VAE模型
By 苏剑林 | 2021-06-29 | 78847位读者 | 引用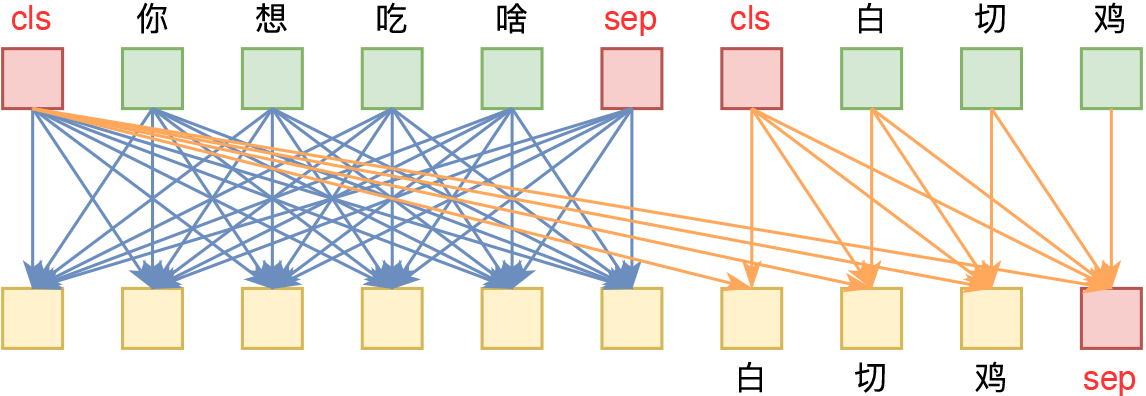
19
Jul
用开源的人工标注数据来增强RoFormer-Sim
By 苏剑林 | 2021-07-19 | 150161位读者 | 引用大家知道,从SimBERT到SimBERTv2(RoFormer-Sim),我们算是为中文文本相似度任务建立了一个还算不错的基准模型。然而,SimBERT和RoFormer-Sim本质上都只是“弱监督”模型,跟“无监督”类似,我们不能指望纯弱监督的模型能达到完美符合人的认知效果。所以,为了进一步提升RoFormer-Sim的效果,我们尝试了使用开源的一些标注数据来辅助训练。本文就来介绍我们的探索过程。
有的读者可能想:有监督有啥好讲的?不就是直接训练么?说是这么说,但其实并没有那么“显然易得”,还是有些“雷区”的,所以本文也算是一份简单的“扫雷指南”吧。
前情回顾
笔者发现,自从SimBERT发布后,读者问得最多的问题大概是:
为什么“我喜欢北京”跟“我不喜欢北京”相似度这么高?它们不是意思相反吗?
22
Jul
概率视角下的线性模型:逻辑回归有解析解吗?
By 苏剑林 | 2021-07-22 | 83537位读者 | 引用我们知道,线性回归是比较简单的问题,它存在解析解,而它的变体逻辑回归(Logistic Regression)却没有解析解,这不能不说是一个遗憾。因为逻辑回归虽然也叫“回归”,但它实际上是用于分类问题的,而对于很多读者来说分类比回归更加常见。准确来说,我们说逻辑回归没有解析解,说的是“最大似然估计下逻辑回归没有解析解”。那么,这是否意味着,如果我们不用最大似然估计,是否能找到一个可用的解析解呢?
逻辑回归示意图
本文将会从非最大似然的角度,推导逻辑回归的一个解析解,简单的实验表明它效果不逊色于梯度下降求出来的最大似然解。此外,这个解析解还易于推广到单层Softmax多分类模型。
9
Aug
线性Transformer应该不是你要等的那个模型
By 苏剑林 | 2021-08-09 | 110121位读者 | 引用在本博客中,我们已经多次讨论过线性Attention的相关内容。介绍线性Attention的逻辑大体上都是:标准Attention具有$\mathcal{O}(n^2)$的平方复杂度,是其主要的“硬伤”之一,于是我们$\mathcal{O}(n)$复杂度的改进模型,也就是线性Attention。有些读者看到线性Attention的介绍后,就一直很期待我们发布基于线性Attention的预训练模型,以缓解他们被BERT的算力消耗所折腾的“死去活来”之苦。
然而,本文要说的是:抱有这种念头的读者可能要失望了,标准Attention到线性Attention的转换应该远远达不到你的预期,而BERT那么慢的原因也并不是因为标准Attention的平方复杂度。
BERT之反思
按照直观理解,平方复杂度换成线性复杂度不应该要“突飞猛进”才对嘛?怎么反而“远远达不到预期”?出现这个疑惑的主要原因,是我们一直以来都没有仔细评估一下常规的Transformer模型(如BERT)的整体计算量。
6
Aug
Transformer升级之路:5、作为无限维的线性Attention
By 苏剑林 | 2021-08-06 | 24716位读者 | 引用在《Performer:用随机投影将Attention的复杂度线性化》中我们了解到Google提出的Performer模型,它提出了一种随机投影方案,可以将标准Attention转化为线性Attention,并保持一定的近似。理论上来说,只要投影的维度足够大,那么可以足够近似标准Attention。换句话说,标准Attention可以视作一个无限维的线性Attention。
本文将介绍笔者构思的另外两种将标准Attention转换为无限维线性Attention的思路,不同于Performer的随机投影,笔者构思的这两种方案都是确定性的,并且能比较方便地感知近似程度。
简要介绍
关于标准Attention和线性Attention,这里就不多做介绍了,还不了解的读者可以参考笔者之前的文章《线性Attention的探索:Attention必须有个Softmax吗?》和《Transformer升级之路:3、从Performer到线性Attention》。简单来说,标准Attention的计算方式为
\begin{equation}a_{i,j}=\frac{e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_j e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
17
Sep
让人惊叹的Johnson-Lindenstrauss引理:理论篇
By 苏剑林 | 2021-09-17 | 91449位读者 | 引用今天我们来学习Johnson-Lindenstrauss引理,由于名字比较长,下面都简称“JL引理”。
个人认为,JL引理是每一个计算机科学的同学都必须了解的神奇结论之一,它是一个关于降维的著名的结果,它也是高维空间中众多反直觉的“维度灾难”现象的经典例子之一。可以说,JL引理是机器学习中各种降维、Hash等技术的理论基础,此外,在现代机器学习中,JL引理也为我们理解、调试模型维度等相关参数提供了重要的理论支撑。
对数的维度
JL引理,可以非常通俗地表达为:
通俗版JL引理: 塞下$N$个向量,只需要$\mathcal{O}(\log N)$维空间。
10
Sep
曾被嫌弃的预训练任务NSP,做出了优秀的Zero Shot效果
By 苏剑林 | 2021-09-10 | 58044位读者 | 引用在五花八门的预训练任务设计中,NSP通常认为是比较糟糕的一种,因为它难度较低,加入到预训练中并没有使下游任务微调时有明显受益,甚至RoBERTa的论文显示它会带来负面效果。所以,后续的预训练工作一般有两种选择:一是像RoBERTa一样干脆去掉NSP任务,二是像ALBERT一样想办法提高NSP的难度。也就是说,一直以来NSP都是比较“让人嫌弃”的。
不过,反转来了,NSP可能要“翻身”了。最近的一篇论文《NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task--Next Sentence Prediction》(下面简称NSP-BERT)显示NSP居然也可以做到非常不错的Zero Shot效果!这又是一个基于模版(Prompt)的Few/Zero Shot的经典案例,只不过这一次的主角是NSP。
背景回顾
曾经我们认为预训练纯粹就是预训练,它只是为下游任务的训练提供更好的初始化,像BERT的预训练任务有MLM(Masked Language Model和NSP(Next Sentence Prediction),在相当长的一段时间内,大家都不关心这两个预训练任务本身,而只是专注于如何通过微调来使得下游任务获得更好的性能。哪怕是T5将模型参数训练到了110亿,走的依然是“预训练+微调”这一路线。

最近评论