






29
Apr
节省显存的重计算技巧也有了Keras版了
By 苏剑林 | 2020-04-29 | 52124位读者 | 引用不少读者最近可能留意到了公众号文章《BERT重计算:用22.5%的训练时间节省5倍的显存开销(附代码)》,里边介绍了一个叫做“重计算”的技巧,简单来说就是用来省显存的方法,让平均训练速度慢一点,但batch_size可以增大好几倍。该技巧首先发布于论文《Training Deep Nets with Sublinear Memory Cost》,其实在2016年就已经提出了,只不过似乎还没有特别流行起来。
探索
公众号文章提到该技巧在pytorch和paddlepaddle都有原生实现了,但tensorflow还没有。但事实上从tensorflow 1.8开始,tensorflow就已经自带了该功能了,当时被列入了tf.contrib这个子库中,而从tensorflow 1.15开始,它就被内置为tensorflow的主函数之一,那就是tf.recompute_grad。
找到tf.recompute_grad之后,笔者就琢磨了一下它的用法,经过一番折腾,最终居然真的成功地用起来了,居然成功地让batch_size从48增加到了144!然而,在继续整理测试的过程中,发现这玩意居然在tensorflow 2.x是失效的...于是再折腾了两天,查找了各种资料并反复调试,最终算是成功地补充了这一缺陷。
最后是笔者自己的开源实现:
该实现已经内置在bert4keras中,使用bert4keras的读者可以升级到最新版本(0.7.5+)来测试该功能。
25
May
Google新作Synthesizer:我们还不够了解自注意力
By 苏剑林 | 2020-05-25 | 98084位读者 | 引用深度学习这个箱子,远比我们想象的要黑。
写在开头
据说物理学家费曼说过一句话[来源]:“谁要是说他懂得量子力学,那他就是真的不懂量子力学。”我现在越来越觉得,这句话中的“量子力学”也可以替换为“深度学习”。尽管深度学习已经在越来越多的领域证明了其有效性,但我们对它的解释性依然相当无力。当然,这几年来已经有不少工作致力于打开深度学习这个黑箱,但是很无奈,这些工作基本都是“马后炮”式的,也就是在已有的实验结果基础上提出一些勉强能说服自己的解释,无法做到自上而下的构建和理解模型的原理,更不用说提出一些前瞻性的预测。
本文关注的是自注意力机制。直观上来看,自注意力机制算是解释性比较强的模型之一了,它通过自己与自己的Attention来自动捕捉了token与token之间的关联,事实上在《Attention is All You Need》那篇论文中,就给出了如下的看上去挺合理的可视化效果:
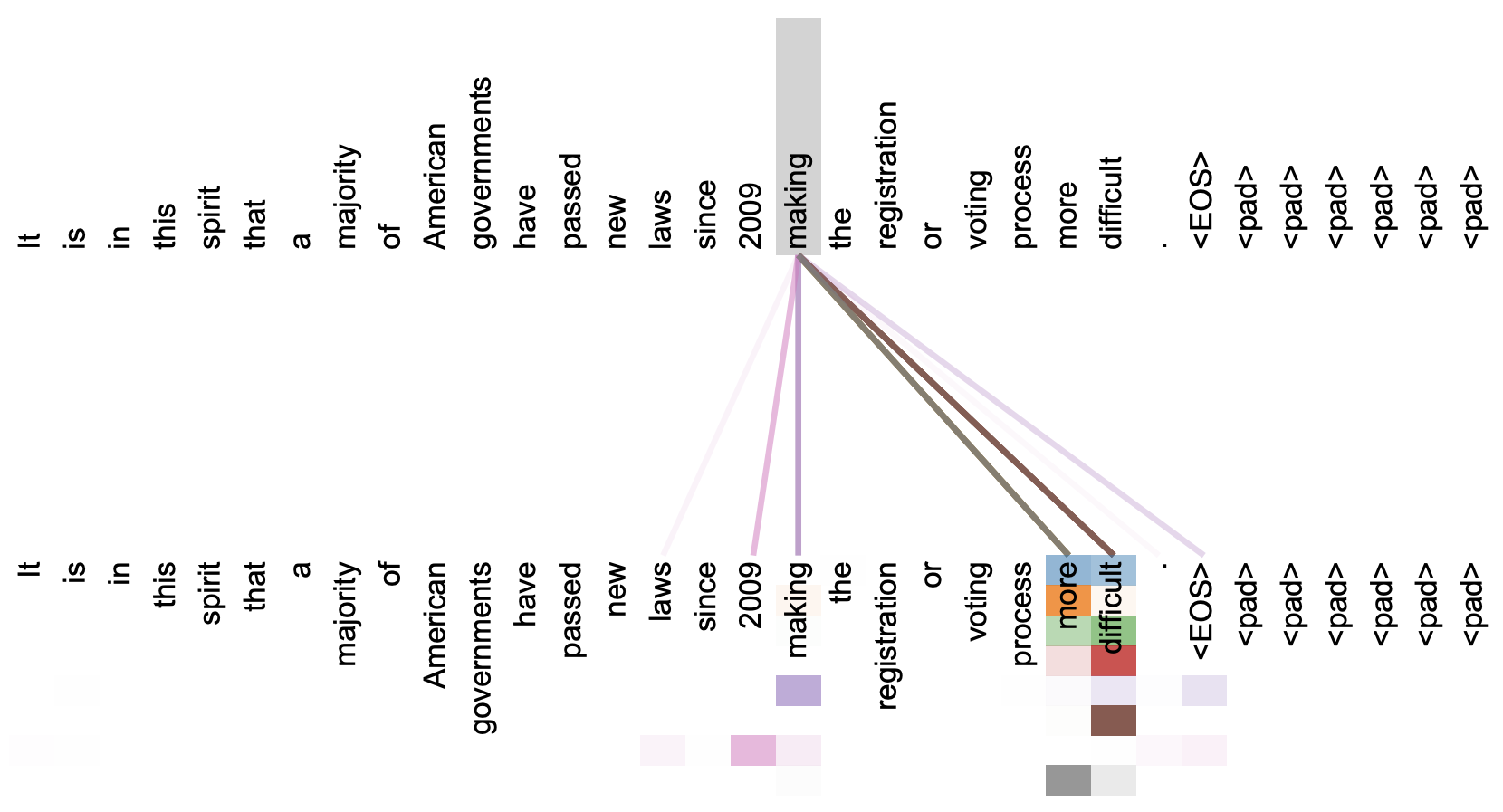
《Attention is All You Need》一文中对Attention的可视化例子
但自注意力机制真的是这样生效的吗?这种“token对token”的注意力是必须的吗?前不久Google的新论文《Synthesizer: Rethinking Self-Attention in Transformer Models》对自注意力机制做了一些“异想天开”的探索,里边的结果也许会颠覆我们对自注意力的认知。
18
Jul
也来扯几句“全国青少年科技创新大赛”
By 苏剑林 | 2020-07-18 | 37762位读者 | 引用
20
Aug
最小熵原理(六):词向量的维度应该怎么选择?
By 苏剑林 | 2020-08-20 | 108613位读者 | 引用随着NLP的发展,像Word2Vec、Glove这样的词向量模型,正逐渐地被基于Transformer的BERT等模型代替,不过经典始终是经典,词向量模型依然在不少场景发光发热,并且仍有不少值得我们去研究的地方。本文我们来关心一个词向量模型可能有的疑惑:词向量的维度大概多少才够?
先说结论,笔者给出的估算结果是
\begin{equation}n > 8.33\log N\label{eq:final}\end{equation}
更简约的话可以直接记$n > 8\log N$,其中$N$是词表大小,$n$就是词向量维度,$\log$是自然对数。当$n$超过这个阈值时,就说明模型有足够的容量容纳这$N$个词语(当然$n$越大过拟合风险也越大)。这样一来,当$N=100000$时,得到的$n$大约是96,所以对于10万个词的词向量模型来说,维度选择96就足够了;如果要容纳500万个词,那么$n$大概就是128。
27
Sep
必须要GPT3吗?不,BERT的MLM模型也能小样本学习
By 苏剑林 | 2020-09-27 | 162308位读者 | 引用大家都知道现在GPT3风头正盛,然而,到处都是GPT3、GPT3地推,读者是否记得GPT3论文的名字呢?事实上,GPT3的论文叫做《Language Models are Few-Shot Learners》,标题里边已经没有G、P、T几个单词了,只不过它跟开始的GPT是一脉相承的,因此还是以GPT称呼它。顾名思义,GPT3主打的是Few-Shot Learning,也就是小样本学习。此外,GPT3的另一个特点就是大,最大的版本多达1750亿参数,是BERT Base的一千多倍。
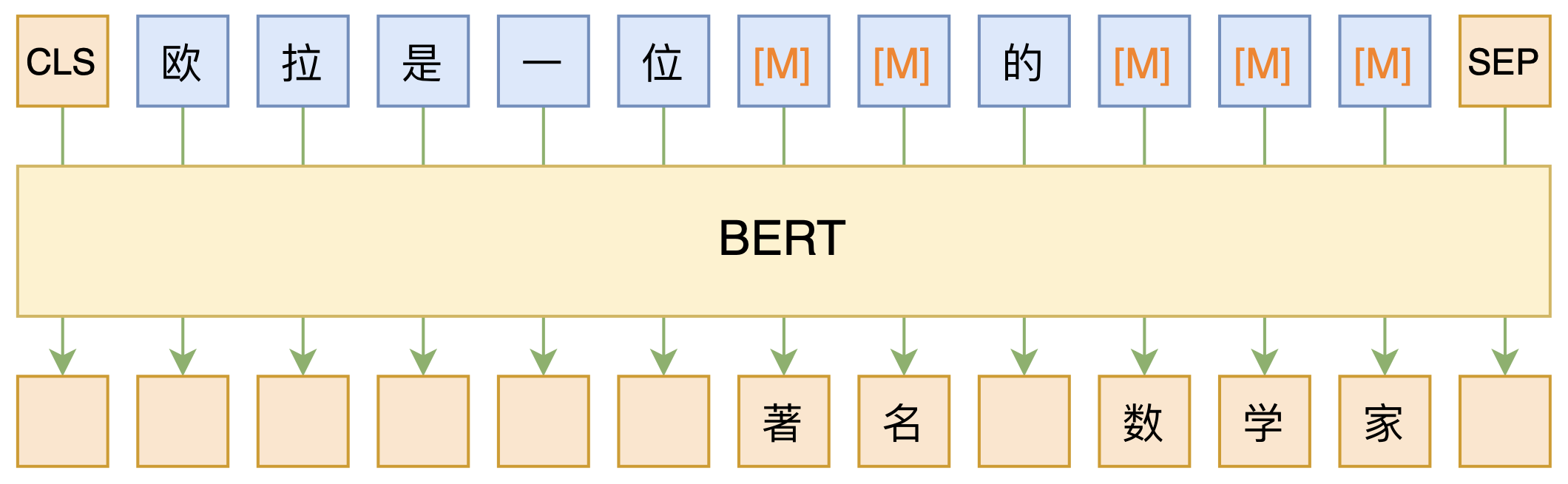
BERT的MLM模型简单示意图
正因如此,前些天Arxiv上的一篇论文《It's Not Just Size That Matters: Small Language Models Are Also Few-Shot Learners》便引起了笔者的注意,意译过来就是“谁说一定要大的?小模型也可以做小样本学习”。显然,这标题对标的就是GPT3,于是笔者饶有兴趣地点进去看看是谁这么有勇气挑战GPT3,又是怎样的小模型能挑战GPT3?经过阅读,原来作者提出通过适当的构造,用BERT的MLM模型也可以做小样本学习,看完之后颇有一种“原来还可以这样做”的恍然大悟感~在此与大家分享一下。
29
Oct
用ALBERT和ELECTRA之前,请确认你真的了解它们
By 苏剑林 | 2020-10-29 | 75818位读者 | 引用在预训练语言模型中,ALBERT和ELECTRA算是继BERT之后的两个“后起之秀”。它们从不同的角度入手对BERT进行了改进,最终提升了效果(至少在不少公开评测数据集上是这样),因此也赢得了一定的口碑。但在平时的交流学习中,笔者发现不少朋友对这两个模型存在一些误解,以至于在使用过程中浪费了不必要的时间。在此,笔者试图对这两个模型的一些关键之处做下总结,供大家参考,希望大家能在使用这两个模型的时候少走一些弯路。

ALBERT与ELECTRA
(注:本文中的“BERT”一词既指开始发布的BERT模型,也指后来的改进版RoBERTa,我们可以将BERT理解为没充分训练的RoBERTa,将RoBERTa理解为更充分训练的BERT。本文主要指的是它跟ALBERT和ELECTRA的对比,因此不区分BERT和RoBERTa。)
27
Oct
TeaForN:让Teacher Forcing更有“远见”一些
By 苏剑林 | 2020-10-27 | 43467位读者 | 引用Teacher Forcing是Seq2Seq模型的经典训练方式,而Exposure Bias则是Teacher Forcing的经典缺陷,这对于搞文本生成的同学来说应该是耳熟能详的事实了。笔者之前也曾写过博文《Seq2Seq中Exposure Bias现象的浅析与对策》,初步地分析过Exposure Bias问题。
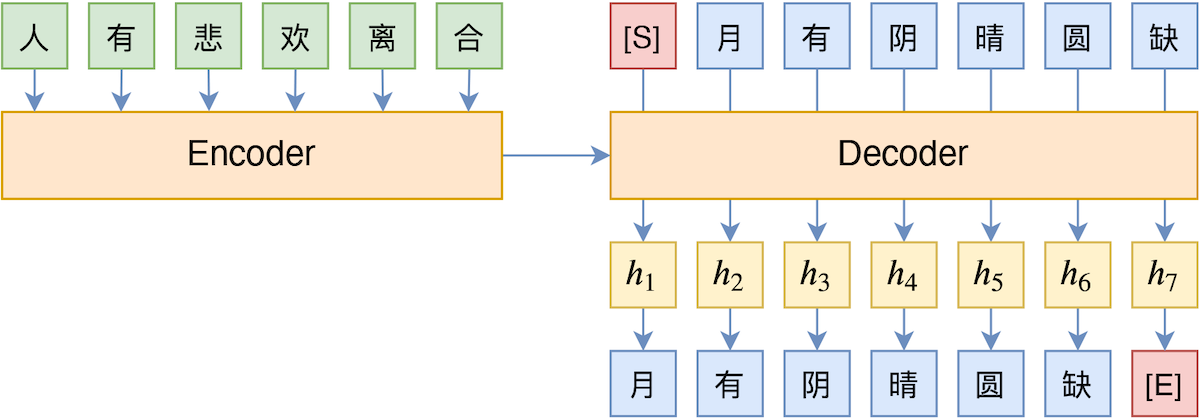
Teacher Forcing示意图
本文则介绍Google新提出的一种名为“TeaForN”的缓解Exposure Bias现象的方案,来自论文《TeaForN: Teacher-Forcing with N-grams》,它通过嵌套迭代的方式,让模型能提前预估到后$N$个token(而不仅仅是当前要预测的token),其处理思路上颇有可圈可点之处,值得我们学习。
(注:为了尽量跟本博客旧文章保持一致,本文的记号与原论文的记号有所不同,请大家以理解符号含义为主,不要强记符号形式。)
6
Nov
那个屠榜的T5模型,现在可以在中文上玩玩了
By 苏剑林 | 2020-11-06 | 139488位读者 | 引用不知道大家对Google去年的屠榜之作T5还有没有印象?就是那个打着“万事皆可Seq2Seq”的旗号、最大搞了110亿参数、一举刷新了GLUE、SuperGLUE等多个NLP榜单的模型,而且过去一年了,T5仍然是SuperGLUE榜单上的第一,目前还稳妥地拉开着第二名2%的差距。然而,对于中文界的朋友来说,T5可能没有什么存在感,原因很简单:没有中文版T5可用。不过这个现状要改变了,因为Google最近放出了多国语言版的T5(mT5),里边当然是包含了中文语言。虽然不是纯正的中文版,但也能凑合着用一下。
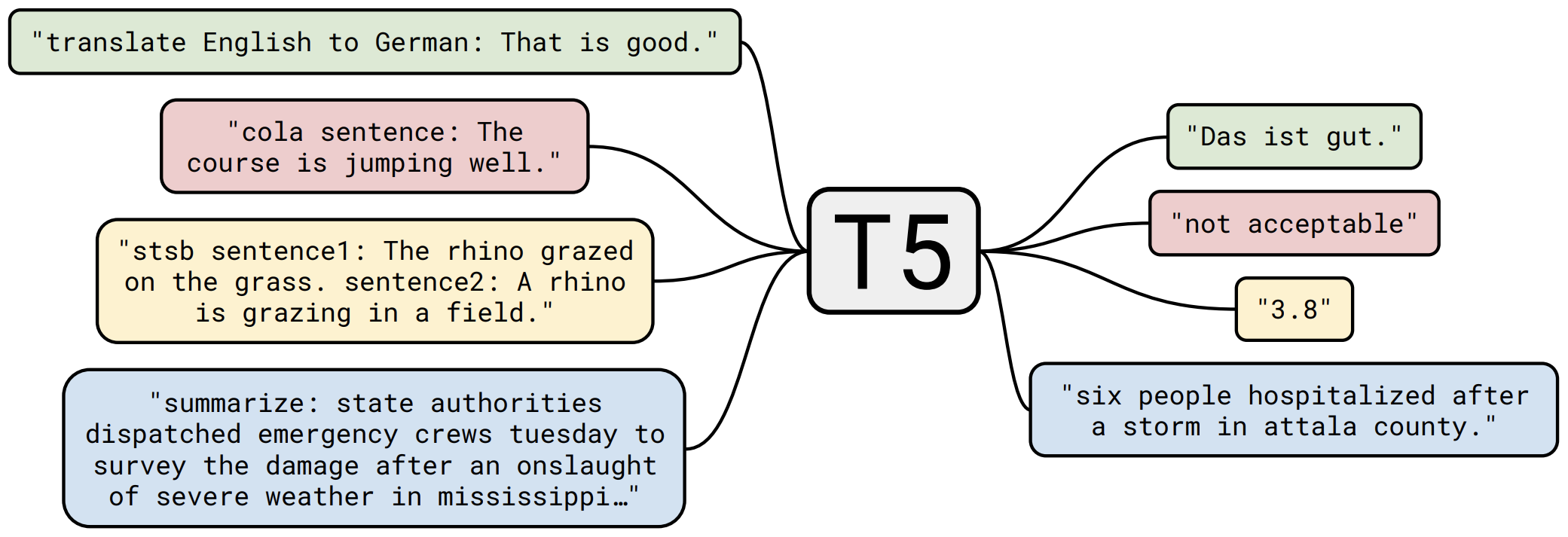
“万事皆可Seq2Seq”的T5
本文将会对T5模型做一个简单的回顾与介绍,然后再介绍一下如何在bert4keras中调用mT5模型来做中文任务。作为一个原生的Seq2Seq预训练模型,mT5在文本生成任务上的表现还是相当不错的,非常值得一试。

最近评论