






31
Jul
我们真的需要把训练集的损失降低到零吗?
By 苏剑林 | 2020-07-31 | 99358位读者 |在训练模型的时候,我们需要损失函数一直训练到0吗?显然不用。一般来说,我们是用训练集来训练模型,但希望的是验证集的损失越小越好,而正常来说训练集的损失降低到一定值后,验证集的损失就会开始上升,因此没必要把训练集的损失降低到0。
既然如此,在已经达到了某个阈值之后,我们可不可以做点别的事情来提升模型性能呢?ICML 2020的论文《Do We Need Zero Training Loss After Achieving Zero Training Error?》回答了这个问题。不过论文的回答也仅局限在“是什么”这个层面上,并没很好地描述“为什么”,另外看了知乎上kid丶大佬的解读,也没找到自己想要的答案。因此自己分析了一下,记录在此。
思路描述 #
论文提供的解决方案非常简单,假设原来的损失函数是$\mathcal{L}(\theta)$,现在改为$\tilde{\mathcal{L}}(\theta)$:
\begin{equation}\tilde{\mathcal{L}}(\theta)=|\mathcal{L}(\theta) - b|+b\end{equation}
其中$b$是预先设定的阈值。当$\mathcal{L}(\theta) > b$时$\tilde{\mathcal{L}}(\theta)=\mathcal{L}(\theta)$,这时候就是执行普通的梯度下降;而$\mathcal{L}(\theta) < b$时$\tilde{\mathcal{L}}(\theta)=2b-\mathcal{L}(\theta)$,注意到损失函数变号了,所以这时候是梯度上升。因此,总的来说就是以$b$为阈值,低于阈值时反而希望损失函数变大。论文把这个改动称为“Flooding”。
这样做有什么效果呢?论文显示,在某些任务中,训练集的损失函数经过这样处理后,验证集的损失能出现“二次下降(Double Descent)”,如下图:
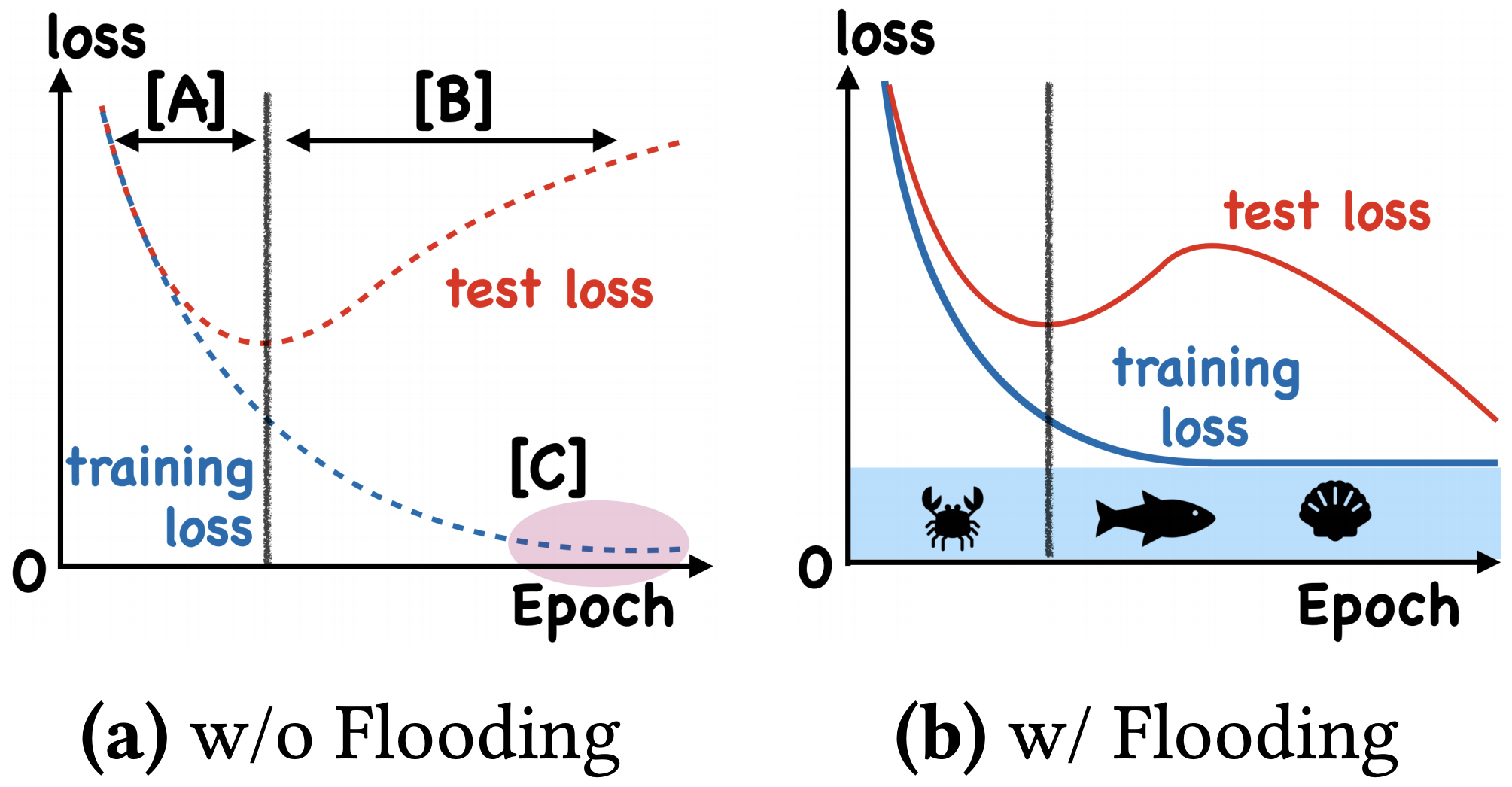
左图:不加Flooding的训练示意图;右图:加了Flooding的训练示意图
简单来说,就是最终的验证集效果可能更好些,原论文的实验结果如下:
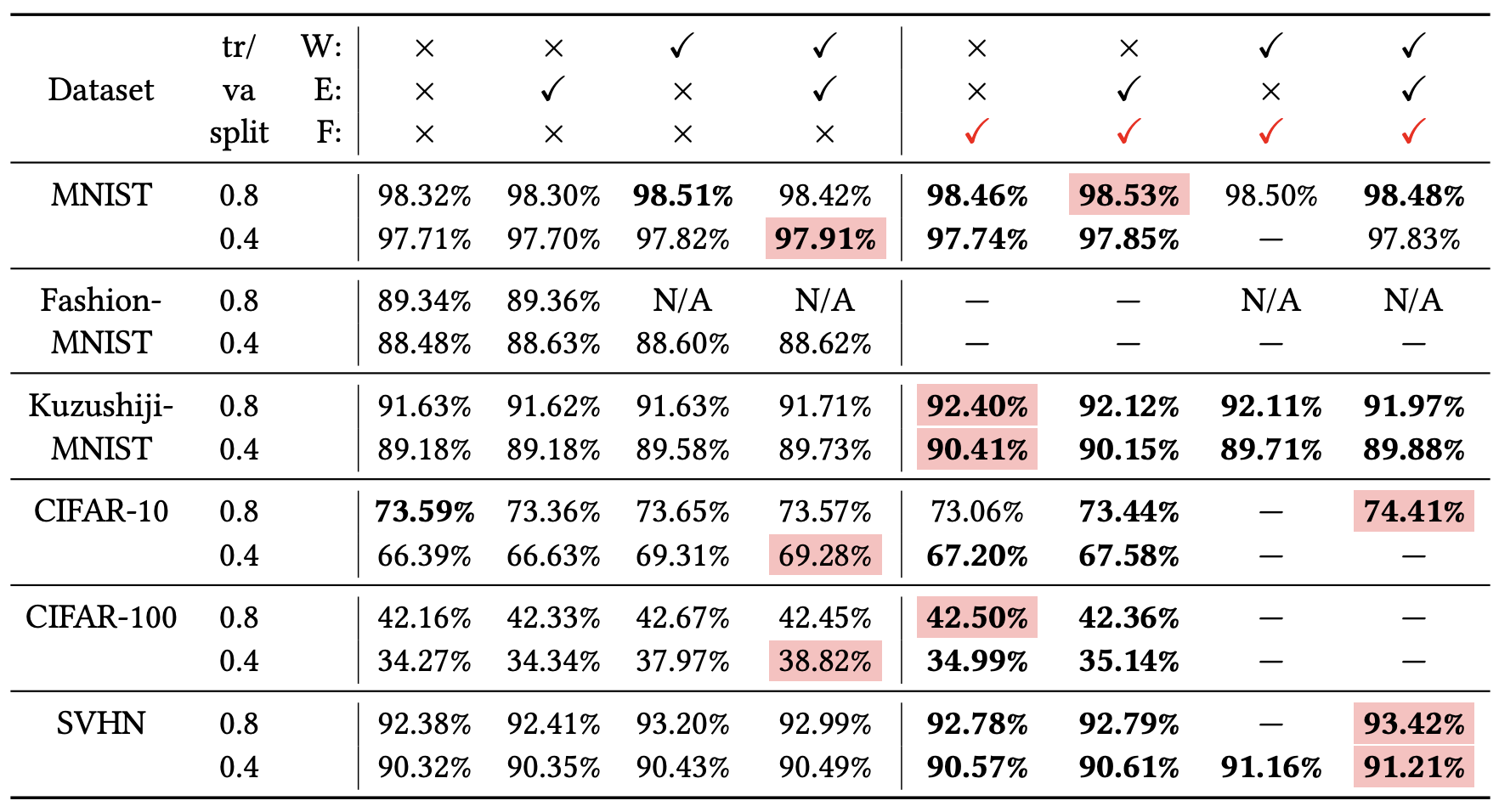
Flooding实验结果。第三行的F就是表示Flooding,带红色勾的列都是加了Flooding的。
个人分析 #
如何解释这个方法呢?可以想象,当损失函数达到$b$之后,训练流程大概就是在交替执行梯度下降和梯度上升。直观想的话,感觉一步上升一步下降,似乎刚好抵消了。事实真的如此吗?我们来算一下看看。假设先下降一步后上升一步,学习率为$\varepsilon$,那么:
\begin{equation}\begin{aligned}&\theta_n = \theta_{n-1} - \varepsilon g(\theta_{n-1})\\
&\theta_{n+1} = \theta_n + \varepsilon g(\theta_n)
\end{aligned}\end{equation}
其中$g(\theta)=\nabla_{\theta}\mathcal{L}(\theta)$,现在我们有
\begin{equation}\begin{aligned}\theta_{n+1} =&\, \theta_{n-1} - \varepsilon g(\theta_{n-1}) + \varepsilon g\big(\theta_{n-1} - \varepsilon g(\theta_{n-1})\big)\\
\approx&\,\theta_{n-1} - \varepsilon g(\theta_{n-1}) + \varepsilon \big(g(\theta_{n-1}) - \varepsilon \nabla_{\theta} g(\theta_{n-1}) g(\theta_{n-1})\big)\\
=&\,\theta_{n-1} - \frac{\varepsilon^2}{2}\nabla_{\theta}\Vert g(\theta_{n-1})\Vert^2
\end{aligned}\end{equation}
这里的$\approx$是使用了泰勒展式对损失函数进行近似展开。
最终的结果就是相当于损失函数为梯度惩罚$\Vert g(\theta)\Vert^2=\Vert\nabla_{\theta}\mathcal{L}(\theta)\Vert^2$、学习率为$\frac{\varepsilon^2}{2}$的梯度下降。更妙的是,改为“先上升再下降”,其表达式依然是一样的(这不禁让我想起“先升价10%再降价10%”和“先降价10%再升价10%”的故事)。因此,平均而言,Flooding对损失函数的改动,相当于在保证了损失函数足够小之后去最小化$\Vert\nabla_{\theta}\mathcal{L}(\theta)\Vert^2$,也就是推动参数往更平稳的区域走,这通常能提供提高泛化性能(更好地抵抗扰动),因此一定程度上就能解释Flooding其作用的原因了。
本质上来讲,这跟往参数里边加入随机扰动、对抗训练等也没什么差别,只不过这里是保证了损失足够小后再加扰动。读者可以参考《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》了解相关内容,也可以参考“圣经”《深度学习》第二部分第七章的“正则化”一节。
继续脑洞 #
有心使用这个方法的读者可能会纠结于$b$的选择,不过笔者倒是有另外一个脑洞:$b$无非就是决定什么时候开始交替训练罢了,如果从一开始就用不同的学习率进行交替训练呢?也就是自始至终都执行
\begin{equation}\begin{aligned}&\theta_n = \theta_{n-1} - \varepsilon_1 g(\theta_{n-1})\\
&\theta_{n+1} = \theta_n + \varepsilon_2 g(\theta_n)
\end{aligned}\end{equation}
其中$\varepsilon_1 > \varepsilon_2$,这样我们就把$b$去掉了(当然引入了$\varepsilon_1/\varepsilon_2$的选择,天下没免费午餐)。重复上述近似展开,我们就得到
\begin{equation}\begin{aligned}
\theta_{n+1} \approx&\, \theta_{n-1} - (\varepsilon_1 - \varepsilon_2) g(\theta_{n-1}) - \frac{\varepsilon_1\varepsilon_2}{2}\nabla_{\theta}\Vert g(\theta_{n-1})\Vert^2\\
=&\,\theta_{n-1} - (\varepsilon_1 - \varepsilon_2)\nabla_{\theta}\left[\mathcal{L}(\theta_{n-1}) + \frac{\varepsilon_1\varepsilon_2}{2(\varepsilon_1 - \varepsilon_2)}\Vert \nabla_{\theta}\mathcal{L}(\theta_{n-1})\Vert^2\right]
\end{aligned}\end{equation}
这就相当于自始至终都在用学习率$\varepsilon_1 - \varepsilon_2$来优化损失函数$\mathcal{L}(\theta) + \frac{\varepsilon_1\varepsilon_2}{2(\varepsilon_1 - \varepsilon_2)}\Vert\nabla_{\theta}\mathcal{L}(\theta)\Vert^2$了,也就是说一开始就把梯度惩罚给加了进去。这样能提升模型的泛化性能吗?笔者简单试了一下,有些情况下会有轻微的提升,基本上都不会有负面影响,总的来说不如自己直接加梯度惩罚好,所以不建议这样做。
注:读者@xx205提供了参考文献《Backstitch: Counteracting Finite-sample Bias via Negative Steps》,里边指出这种做法在语音识别上是有效的,所以笔者的上述说法可能也不尽完善,请读者自行测试甄别。再次感谢读者读者@xx205提供的资料。
文章小结 #
本文简单介绍了ICML 2020一篇论文提出的“到一定程度后就梯度上升”的训练策略,并给出了自己的推导和理解,结果显示它相当于对参数的梯度惩罚,而梯度惩罚也是常见的正则化手段之一。
转载到请包括本文地址:https://kexue.fm/archives/7643
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jul. 31, 2020). 《我们真的需要把训练集的损失降低到零吗? 》[Blog post]. Retrieved from https://kexue.fm/archives/7643
@online{kexuefm-7643,
title={我们真的需要把训练集的损失降低到零吗?},
author={苏剑林},
year={2020},
month={Jul},
url={\url{https://kexue.fm/archives/7643}},
}

July 31st, 2020
很巧秒的思路,赞苏神!!!
July 31st, 2020
妙啊,感谢
August 4th, 2020
请问苏神有考虑过写一些迁移学习或者小样本学习的东西吗~~谢谢
暂时没考虑~
August 20th, 2020
666
August 22nd, 2020
“继续脑洞” 那部分的做法,在语音识别领域有人(经验性地)发现过了。论文实验结果显示,在一些语音识别任务上,相对于普通的做法,词错误率能有相对 10% 的下降。
http://www.danielpovey.com/files/2017_interspeech_backstitch.pdf
非常棒的资料,感谢提供。已经在原文附上了这份资料的补充说明了。
September 14th, 2020
博主你好,请问你有思考过如果对单个样本的loss进行Flooding会出现什么结果嘛?想请问下你的想法。
没考虑过,你可以尝试一下,可能会work
November 26th, 2020
还是为了避免模型参数停在鞍点。
测试准确度上升,是因为模型摆脱了鞍点。
优化器有没有可能进入鞍点其实很难说,任何关于进入“鞍点”、“局部极小值点”之类的猜测,对于维度灾难的神经网络而言,很难论证其成立与否。
关于本文的推断,这样做有助于模型进入梯度为0的点,至于是鞍点还是局部极小值,真的不大重要,反正都属于相对平稳的驻点,没有任何证据表明鞍点就一定不好。事实上,只要loss只够小,参数所在位置足够平稳(梯度约等于0),那么管它是什么点呢~
July 23rd, 2021
苏神,跪求再讲讲是如何“使用了泰勒展式对损失函数进行近似展开”的
$$g\big(\theta_{n-1} - \varepsilon g(\theta_{n-1})\big)\approx g(\theta_{n-1}) - \varepsilon \nabla_{\theta} g(\theta_{n-1}) g(\theta_{n-1})$$
这也没什么好讲的了啊,就是一阶泰勒展开。
June 30th, 2022
没看到有录用记录,NIPS2021审稿为Reject
https://openreview.net/forum?id=PPGfoNJnLKd
January 24th, 2023
[...]我们真的需要把训练集的损失降低到零吗?[...]