






18
May
简明条件随机场CRF介绍(附带纯Keras实现)
By 苏剑林 | 2018-05-18 | 443748位读者 |笔者去年曾写过博文《果壳中的条件随机场(CRF In A Nutshell)》,以一种比较粗糙的方式介绍了一下条件随机场(CRF)模型。然而那篇文章显然有很多不足的地方,比如介绍不够清晰,也不够完整,还没有实现,在这里我们重提这个模型,将相关内容补充完成。
本文是对CRF基本原理的一个简明的介绍。当然,“简明”是相对而言中,要想真的弄清楚CRF,免不了要提及一些公式,如果只关心调用的读者,可以直接移到文末。
图示 #
按照之前的思路,我们依旧来对比一下普通的逐帧softmax和CRF的异同。
逐帧softmax #
CRF主要用于序列标注问题,可以简单理解为是给序列中的每一帧都进行分类,既然是分类,很自然想到将这个序列用CNN或者RNN进行编码后,接一个全连接层用softmax激活,如下图所示
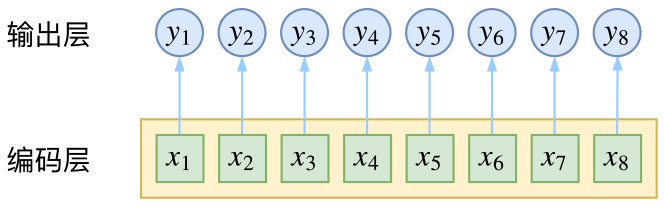
逐帧softmax并没有直接考虑输出的上下文关联
条件随机场 #
然而,当我们设计标签时,比如用s、b、m、e的4个标签来做字标注法的分词,目标输出序列本身会带有一些上下文关联,比如s后面就不能接m和e,等等。逐标签softmax并没有考虑这种输出层面的上下文关联,所以它意味着把这些关联放到了编码层面,希望模型能自己学到这些内容,但有时候会“强模型所难”。
而CRF则更直接一点,它将输出层面的关联分离了出来,这使得模型在学习上更为“从容”:

CRF在输出端显式地考虑了上下文关联
数学 #
当然,如果仅仅是引入输出的关联,还不仅仅是CRF的全部,CRF的真正精巧的地方,是它以路径为单位,考虑的是路径的概率。
模型概要 #
假如一个输入有$n$帧,每一帧的标签有$k$种可能性,那么理论上就有$k^n$种不同的输出。我们可以将它用如下的网络图进行简单的可视化。在下图中,每个点代表一个标签的可能性,点之间的连线表示标签之间的关联,而每一种标注结果,都对应着图上的一条完整的路径。
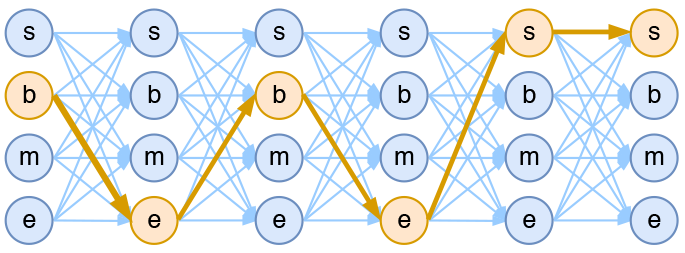
4tag分词模型中输出网络图
而在序列标注任务中,我们的正确答案是一般是唯一的。比如“今天天气不错”,如果对应的分词结果是“今天/天气/不/错”,那么目标输出序列就是bebess,除此之外别的路径都不符合要求。换言之,在序列标注任务中,我们的研究的基本单位应该是路径,我们要做的事情,是从$k^n$条路径选出正确的一条,那就意味着,如果将它视为一个分类问题,那么将是$k^n$类中选一类的分类问题!
这就是逐帧softmax和CRF的根本不同了:前者将序列标注看成是$n$个$k$分类问题,后者将序列标注看成是$1$个$k^n$分类问题。
具体来讲,在CRF的序列标注问题中,我们要计算的是条件概率
$$P(y_1,\dots,y_n|x_1,\dots,x_n)=P(y_1,\dots,y_n|\boldsymbol{x}),\quad \boldsymbol{x}=(x_1,\dots,x_n)\tag{1}$$
为了得到这个概率的估计,CRF做了两个假设:
假设一 该分布是指数族分布。
这个假设意味着存在函数$f(y_1,\dots,y_n;\boldsymbol{x})$,使得
$$P(y_1,\dots,y_n|\boldsymbol{x})=\frac{1}{Z(\boldsymbol{x})}\exp\Big(f(y_1,\dots,y_n;\boldsymbol{x})\Big)\tag{2}$$
其中$Z(\boldsymbol{x})$是归一化因子,因为这个是条件分布,所以归一化因子跟$\boldsymbol{x}$有关。这个$f$函数可以视为一个打分函数,打分函数取指数并归一化后就得到概率分布。
假设二 输出之间的关联仅发生在相邻位置,并且关联是指数加性的。
这个假设意味着$f(y_1,\dots,y_n;\boldsymbol{x})$可以更进一步简化为
$$\begin{aligned}f(y_1,\dots,y_n;\boldsymbol{x})=&h(y_1;\boldsymbol{x})+g(y_1,y_2;\boldsymbol{x})+h(y_2;\boldsymbol{x})+g(y_2,y_3;\boldsymbol{x})+h(y_3;\boldsymbol{x})\\
&+\dots+g(y_{n-1},y_n;\boldsymbol{x})+h(y_n;\boldsymbol{x})\end{aligned}\tag{3}$$
这也就是说,现在我们只需要对每一个标签和每一个相邻标签对分别打分,然后将所有打分结果求和得到总分。
线性链CRF #
尽管已经做了大量简化,但一般来说,$(3)$式所表示的概率模型还是过于复杂,难以求解。于是考虑到当前深度学习模型中,RNN或者层叠CNN等模型已经能够比较充分捕捉各个$y$与输入$\boldsymbol{x}$的联系,因此,我们不妨考虑函数$g$跟$\boldsymbol{x}$无关,那么
$$\begin{aligned}f(y_1,\dots,y_n;\boldsymbol{x})=h(y_1;\boldsymbol{x})+&g(y_1,y_2)+h(y_2;\boldsymbol{x})+\dots\\
+&g(y_{n-1},y_n)+h(y_n;\boldsymbol{x})\end{aligned}\tag{4}$$
这时候$g$实际上就是一个有限的、待训练的参数矩阵而已,而单标签的打分函数$h(y_i;\boldsymbol{x})$我们可以通过RNN或者CNN来建模。因此,该模型是可以建立的,其中概率分布变为
$$P(y_1,\dots,y_n|\boldsymbol{x})=\frac{1}{Z(\boldsymbol{x})}\exp\left(h(y_1;\boldsymbol{x})+\sum_{t=1}^{n-1}\Big[g(y_t,y_{t+1})+h(y_{t+1};\boldsymbol{x})\Big]\right)\tag{5}$$
这就是线性链CRF的概念。
归一化因子 #
为了训练CRF模型,我们用最大似然方法,也就是用
$$-\log P(y_1,\dots,y_n|\boldsymbol{x})\tag{6}$$
作为损失函数,可以算出它等于
$$-\left(h(y_1;\boldsymbol{x})+\sum_{t=1}^{n-1}\Big[g(y_t,y_{t+1})+h(y_{t+1};\boldsymbol{x})\Big]\right)+\log Z(\boldsymbol{x})\tag{7}$$
其中第一项是原来概率式的分子的对数,它目标的序列的打分,虽然它看上去挺迂回的,但是并不难计算。真正的难度在于分母的对数$\log Z(\boldsymbol{x})$这一项。
归一化因子,在物理上也叫配分函数,在这里它需要我们对所有可能的路径的打分进行指数求和,而我们前面已经说到,这样的路径数是指数量级的($k^n$),因此直接来算几乎是不可能的。
事实上,归一化因子难算,几乎是所有概率图模型的公共难题。幸运的是,在CRF模型中,由于我们只考虑了临近标签的联系(马尔可夫假设),因此我们可以递归地算出归一化因子,这使得原来是指数级的计算量降低为线性级别。具体来说,我们将计算到时刻$t$的归一化因子记为$Z_t$,并将它分为$k$个部分
$$Z_t = Z^{(1)}_t + Z^{(2)}_t + \dots + Z^{(k)}_t\tag{8}$$
其中$Z^{(1)}_t,\dots,Z^{(k)}_t$分别是截止到当前时刻$t$中、以标签$1,\dots,k$为终点的所有路径的得分指数和。那么,我们可以递归地计算
$$\begin{aligned}Z^{(1)}_{t+1} = &\Big(Z^{(1)}_t G_{11} + Z^{(2)}_t G_{21} + \dots + Z^{(k)}_t G_{k1} \Big) H_{t+1}(1|\boldsymbol{x})\\
Z^{(2)}_{t+1} = &\Big(Z^{(1)}_t G_{12} + Z^{(2)}_t G_{22} + \dots + Z^{(k)}_t G_{k2} \Big) H_{t+1}(2|\boldsymbol{x})\\
&\qquad\qquad\vdots\\
Z^{(k)}_{t+1} =& \Big(Z^{(1)}_t G_{1k} + Z^{(2)}_t G_{2k} + \dots + Z^{(k)}_t G_{kk} \Big) H_{t+1}(k|\boldsymbol{x})
\end{aligned}\tag{9}$$
它可以简单写为矩阵形式
$$\boldsymbol{Z}_{t+1} = \boldsymbol{Z}_{t} \boldsymbol{G}\otimes H(y_{t+1}|\boldsymbol{x})\tag{10}$$
其中$\boldsymbol{Z}_{t}=\Big[Z^{(1)}_t,\dots,Z^{(k)}_t\Big]$;而$\boldsymbol{G}$是对矩阵$g$各个元素取指数后的矩阵(前面已经说过,最简单的情况下,$g$只是一个矩阵,代表某个标签到另一个标签的分数),即$\boldsymbol{G}_{ij}=e^{g_{ij}}$;而$H(y_{t+1}|\boldsymbol{x})$是编码模型$h(y_{t+1}|\boldsymbol{x})$(RNN、CNN等)对位置$t+1$的各个标签的打分的指数,即$H(y_{t+1}|\boldsymbol{x})=e^{h(y_{t+1}|\boldsymbol{x})}$,也是一个向量。式$(10)$中,$\boldsymbol{Z}_{t} \boldsymbol{G}$这一步是矩阵乘法,得到一个向量,而$\otimes$是两个向量的逐位对应相乘。
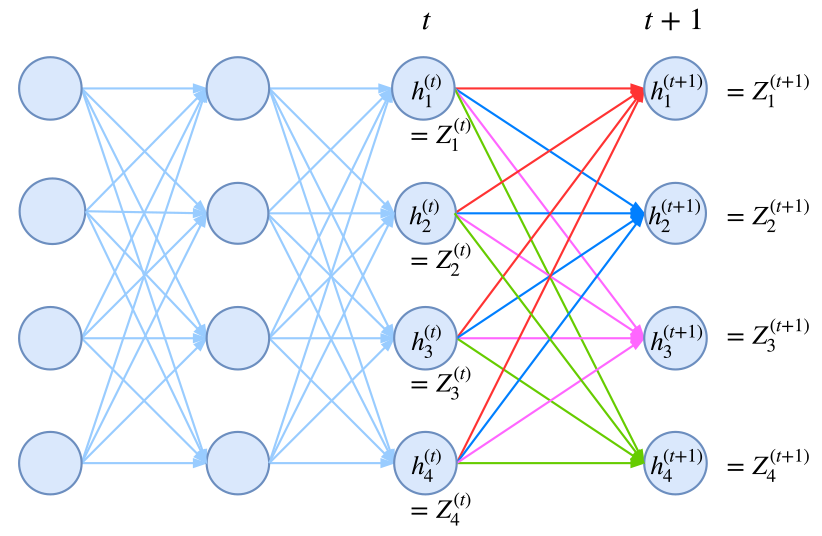
归一化因子的递归计算图示。从t到t+1时刻的计算,包括转移概率和j+1节点本身的概率
如果不熟悉的读者,可能一下子比较难接受$(10)$式。读者可以把$n=1,n=2,n=3$时的归一化因子写出来,试着找它们的递归关系,慢慢地就可以理解$(10)$式了。
动态规划 #
写出损失函数$-\log P(y_1,\dots,y_n|\boldsymbol{x})$后,就可以完成模型的训练了,因为目前的深度学习框架都已经带有自动求导的功能,只要我们能写出可导的loss,就可以帮我们完成优化过程了。
那么剩下的最后一步,就是模型训练完成后,如何根据输入找出最优路径来。跟前面一样,这也是一个从$k^n$条路径中选最优的问题,而同样地,因为马尔可夫假设的存在,它可以转化为一个动态规划问题,用viterbi算法解决,计算量正比于$n$。
动态规划在本博客已经出现了多次了,它的递归思想就是:一条最优路径切成两段,那么每一段都是一条(局部)最优路径。在本博客右端的搜索框键入“动态规划”,就可以得到很多相关介绍了,所以不再重复了~
实现 #
经过调试,基于Keras框架下,笔者得到了一个线性链CRF的简明实现,这也许是最简短的CRF实现了。这里分享最终的实现并介绍实现要点。
实现要点 #
前面我们已经说明了,实现CRF的困难之处是$-\log P(y_1,\dots,y_n|\boldsymbol{x})$的计算,而本质困难是归一化因子部分$Z(\boldsymbol{x})$的计算,得益于马尔科夫假设,我们得到了递归的$(9)$式或$(10)$式,它们应该已经是一般情况下计算$Z(\boldsymbol{x})$的计算了。
那么怎么在深度学习框架中实现这种递归计算呢?要注意,从计算图的视角看,这是通过递归的方法定义一个图,而且这个图的长度还不固定。这对于pytorch这样的动态图框架应该是不为难的,但是对于tensorflow或者基于tensorflow的Keras就很难操作了(它们是静态图框架)。
不过,并非没有可能,我们可以用封装好的rnn函数来计算!我们知道,rnn本质上就是在递归计算
$$\boldsymbol{h}_{t+1} = f(\boldsymbol{x}_{t+1}, \boldsymbol{h}_{t})\tag{11}$$
新版本的tensorflow和Keras都已经允许我们自定义rnn细胞,这就意味着函数$f$可以自行定义,而后端自动帮我们完成递归计算。于是我们只需要设计一个rnn,使得我们要计算的$\boldsymbol{Z}$对应于rnn的隐藏向量!
这就是CRF实现中最精致的部分了。
至于剩下的,是一些细节性的,包括:
1、为了防止溢出,我们通常要取对数,但由于归一化因子是指数求和,所以实际上是$\log\left(\sum_{i=1}^k e^{a_i}\right)$这样的格式,它的计算技巧是:
$$\log\left(\sum_{i=1}^k e^{a_i}\right)=A + \log\left(\sum_{i=1}^k e^{a_i-A}\right),\quad A = \max \{a_1,\dots,a_k\}$$
tensorflow和Keras中都已经封装好了对应的logsumexp函数了,直接调用即可;2、对于分子(也就是目标序列的得分)的计算技巧,在代码中已经做了注释,主要是通过用“目标序列”点乘“预测序列”来实现取出目标得分;
3、关于变长输入的padding部分如何进行mask?我觉得在这方面Keras做得并不是很好。为了简单实现这种mask,我的做法是引入多一个标签,比如原来是s、b、m、e四个标签做分词,然后引入第五个标签,比如x,将padding部分的标签都设为x,然后可以直接在CRF损失计算时忽略第五个标签的存在,具体实现请看代码。
代码速览 #
纯Keras实现的CRF层,欢迎使用~
# -*- coding:utf-8 -*-
from keras.layers import Layer
import keras.backend as K
class CRF(Layer):
"""纯Keras实现CRF层
CRF层本质上是一个带训练参数的loss计算层,因此CRF层只用来训练模型,
而预测则需要另外建立模型。
"""
def __init__(self, ignore_last_label=False, **kwargs):
"""ignore_last_label:定义要不要忽略最后一个标签,起到mask的效果
"""
self.ignore_last_label = 1 if ignore_last_label else 0
super(CRF, self).__init__(**kwargs)
def build(self, input_shape):
self.num_labels = input_shape[-1] - self.ignore_last_label
self.trans = self.add_weight(name='crf_trans',
shape=(self.num_labels, self.num_labels),
initializer='glorot_uniform',
trainable=True)
def log_norm_step(self, inputs, states):
"""递归计算归一化因子
要点:1、递归计算;2、用logsumexp避免溢出。
技巧:通过expand_dims来对齐张量。
"""
inputs, mask = inputs[:, :-1], inputs[:, -1:]
states = K.expand_dims(states[0], 2) # (batch_size, output_dim, 1)
trans = K.expand_dims(self.trans, 0) # (1, output_dim, output_dim)
outputs = K.logsumexp(states + trans, 1) # (batch_size, output_dim)
outputs = outputs + inputs
outputs = mask * outputs + (1 - mask) * states[:, :, 0]
return outputs, [outputs]
def path_score(self, inputs, labels):
"""计算目标路径的相对概率(还没有归一化)
要点:逐标签得分,加上转移概率得分。
技巧:用“预测”点乘“目标”的方法抽取出目标路径的得分。
"""
point_score = K.sum(K.sum(inputs * labels, 2), 1, keepdims=True) # 逐标签得分
labels1 = K.expand_dims(labels[:, :-1], 3)
labels2 = K.expand_dims(labels[:, 1:], 2)
labels = labels1 * labels2 # 两个错位labels,负责从转移矩阵中抽取目标转移得分
trans = K.expand_dims(K.expand_dims(self.trans, 0), 0)
trans_score = K.sum(K.sum(trans * labels, [2, 3]), 1, keepdims=True)
return point_score + trans_score # 两部分得分之和
def call(self, inputs): # CRF本身不改变输出,它只是一个loss
return inputs
def loss(self, y_true, y_pred): # 目标y_pred需要是one hot形式
if self.ignore_last_label:
mask = 1 - y_true[:, :, -1:]
else:
mask = K.ones_like(y_pred[:, :, :1])
y_true, y_pred = y_true[:, :, :self.num_labels], y_pred[:, :, :self.num_labels]
path_score = self.path_score(y_pred, y_true) # 计算分子(对数)
init_states = [y_pred[:, 0]] # 初始状态
y_pred = K.concatenate([y_pred, mask])
log_norm, _, _ = K.rnn(self.log_norm_step, y_pred[:, 1:], init_states) # 计算Z向量(对数)
log_norm = K.logsumexp(log_norm, 1, keepdims=True) # 计算Z(对数)
return log_norm - path_score # 即log(分子/分母)
def accuracy(self, y_true, y_pred): # 训练过程中显示逐帧准确率的函数,排除了mask的影响
mask = 1 - y_true[:, :, -1] if self.ignore_last_label else None
y_true, y_pred = y_true[:, :, :self.num_labels], y_pred[:, :, :self.num_labels]
isequal = K.equal(K.argmax(y_true, 2), K.argmax(y_pred, 2))
isequal = K.cast(isequal, 'float32')
if mask == None:
return K.mean(isequal)
else:
return K.sum(isequal * mask) / K.sum(mask)
除去注释和accuracy的代码,真正的CRF的代码量也就30行左右,可以说跟哪个框架比较都称得上是简明的CRF实现了吧~
用纯Keras实现一些复杂的模型,是一件颇有意思的事情。目前仅在tensorflow后端测试通过,理论上兼容theano、cntk后端,但可能要自行微调。
使用案例 #
我的Github中还附带了一个使用CNN+CRF实现的中文分词的例子,用的是Bakeoff 2005语料,例子是一个完整的分词实现,包括viterbi算法、分词输出等。
Github地址:https://github.com/bojone/crf/
相关的内容还可以看我之前的文章:
结语 #
终于介绍完了,希望大家有所收获,也希望最后的实现能对大家有所帮助~
转载到请包括本文地址:https://kexue.fm/archives/5542
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (May. 18, 2018). 《简明条件随机场CRF介绍(附带纯Keras实现) 》[Blog post]. Retrieved from https://kexue.fm/archives/5542
@online{kexuefm-5542,
title={简明条件随机场CRF介绍(附带纯Keras实现)},
author={苏剑林},
year={2018},
month={May},
url={\url{https://kexue.fm/archives/5542}},
}

June 4th, 2023
[...]CRF是做序列标注的经典方法,它理论优雅,实际也很有效,如果还不了解CRF的读者欢迎阅读旧作《简明条件随机场CRF介绍(附带纯Keras实现)》。在BERT模型出来之后,也有不少工作探索了BERT+CRF用于序列标注任务的做法。然而,很多实验结果显示(比如论文《BERT Meets Chinese Word Segmentation》)不管是中文分词还是实体识别任务,相比于简单的BERT+Soft[...]
December 22nd, 2023
第33行代码outputs = K.logsumexp(states + trans, 1)没有用outputs = K.sum(states + trans, 1),是因为要避免溢出么?这样会不会导致分子的目标路径和分母的全部路径计算方法不完全一致呢?恳请指教
states和trans都是经过$\log$之后的logits,所以用logsumexp是因为用logsumexp才是对的,用sum就是错的。
当然,为什么全体都要取$\log$,那就是你说的原因,防止溢出了。