






29
Mar
Transformer升级之路:17、多模态位置编码的简单思考
By 苏剑林 | 2024-03-29 | 151878位读者 |在这个系列的第二篇文章《Transformer升级之路:2、博采众长的旋转式位置编码》中,笔者提出了旋转位置编码(RoPE)——通过绝对位置的形式实现相对位置编码的方案。一开始RoPE是针对一维序列如文本、音频等设计的(RoPE-1D),后来在《Transformer升级之路:4、二维位置的旋转式位置编码》中我们将它推广到了二维序列(RoPE-2D),这适用于图像的ViT。然而,不管是RoPE-1D还是RoPE-2D,它们的共同特点都是单一模态,即纯文本或者纯图像输入场景,那么对于多模态如图文混合输入场景,RoPE该做如何调整呢?
笔者搜了一下,发现鲜有工作讨论这个问题,主流的做法似乎都是直接展平所有输入,然后当作一维输入来应用RoPE-1D,因此连RoPE-2D都很少见。且不说这种做法会不会成为图像分辨率进一步提高时的效果瓶颈,它终究是显得不够优雅。所以,接下来我们试图探寻两者的一个自然结合。
旋转位置 #
RoPE名称中的“旋转”一词,来源于旋转矩阵$\boldsymbol{\mathcal{R}}_n=\begin{pmatrix}\cos n\theta & -\sin n\theta\\ \sin n\theta & \cos n\theta\end{pmatrix}$,它满足
\begin{equation}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n-m}\end{equation}
这样一来对于$\boldsymbol{q},\boldsymbol{k}$(假设为列向量)的内积就有
\begin{equation}\left(\boldsymbol{\mathcal{R}}_m\boldsymbol{q}\right)^{\top} \left(\boldsymbol{\mathcal{R}}_n\boldsymbol{k}\right)= \boldsymbol{q}^{\top}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n \boldsymbol{k}=\boldsymbol{q}^{\top}\boldsymbol{\mathcal{R}}_{n-m}\boldsymbol{k}\end{equation}
最左边的式子中,$\boldsymbol{\mathcal{R}}_m\boldsymbol{q},\boldsymbol{\mathcal{R}}_n\boldsymbol{k}$是独立进行的,不涉及到$m,n$的交互,所以它形式上是绝对位置,但最右端的等价形式只依赖于相对位置$n-m$,所以跟Dot-Product的Attention结合之后,它实质表现为相对位置。这个特性也让RoPE具备平移不变性:因为$(n+c) - (m+c) = n-m$,所以在应用RoPE之前全体绝对位置都加上一个常数,那么Attention的结果理论上不会变化(实际上受限于计算精度,可能有微小误差)。
以上是$\boldsymbol{q},\boldsymbol{k}\in\mathbb{R}^2$的形式,对于$\boldsymbol{q},\boldsymbol{k}\in \mathbb{R}^d$(其中$d$是偶数),我们需要一个$d\times d$的旋转矩阵,为此我们引入$d/2$个不同的$\theta$,构造分块对角矩阵
\begin{equation}\small{\boldsymbol{\mathcal{R}}_n^{(d\times d)} = \begin{pmatrix}
\cos n\theta_0 & -\sin n\theta_0 & 0 & 0 & \cdots & 0 & 0 \\
\sin n\theta_0 & \cos n\theta_0 & 0 & 0 & \cdots & 0 & 0 \\
0 & 0 & \cos n\theta_1 & -\sin n\theta_1 & \cdots & 0 & 0 \\
0 & 0 & \sin n\theta_1 & \cos n\theta_1 & \cdots & 0 & 0 \\
\vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\
0 & 0 & 0 & 0 & \cdots & \cos n\theta_{d/2-1} & -\sin n\theta_{d/2-1} \\
0 & 0 & 0 & 0 & \cdots & \sin n\theta_{d/2-1} & \cos n\theta_{d/2-1} \\
\end{pmatrix}}\end{equation}
从实现上看,就是将$\boldsymbol{q},\boldsymbol{k}$两两分组,每组取不同的$\theta$进行二维的旋转变换,这些是已有的RoPE内容,就不再详细展开了。原则上来说,我们只需要找到一个最低维的解,就可以通过分块对角的方式推广到一般维度,因此下面的分析都只考虑最小维度。
二维位置 #
当我们谈到“维度”这个概念时,可能会有多种含义,比如刚才我们说$\boldsymbol{q},\boldsymbol{k}\in \mathbb{R}^d$,这就是说$\boldsymbol{q},\boldsymbol{k}$都是$d$维向量,但本文所聚焦的RoPE-1D、RoPE-2D,它并不是指这个维度,而是指记录一个位置所需要的维度。

文本及其位置ID
比如,我们要文本的某个token的位置,那么只需要一个标量$n$,记录它是第$n$个token。但对于图像来说,即便进行了patchify,它通常也会保留width和height两个方向维度,所以我们需要一对坐标$(x,y)$才能准确编码某个patch的位置:
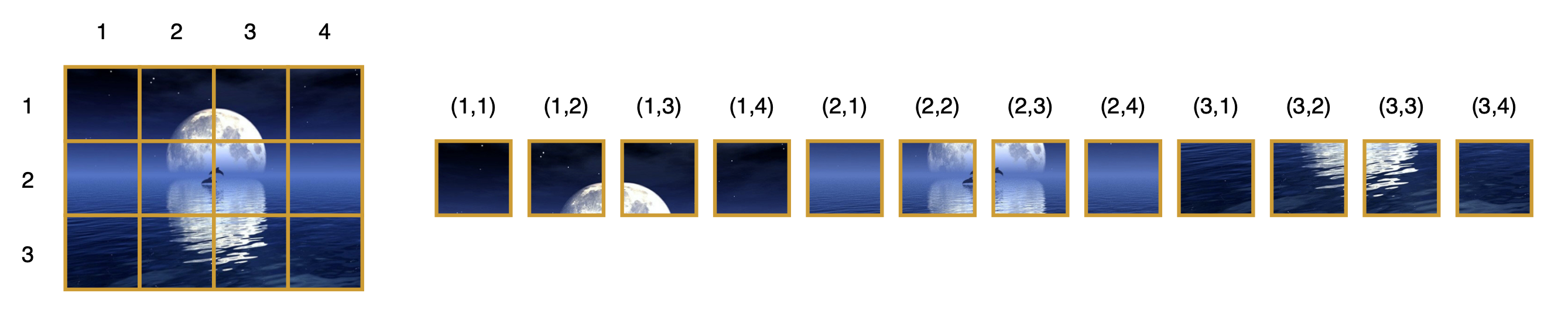
图片及其位置坐标
上一节介绍$\boldsymbol{\mathcal{R}}_n$,它只编码了一个标量$n$,所以它是RoPE-1D,而为了更合理地处理图像输入,我们要推广到相应的RoPE-2D:
\begin{equation}\boldsymbol{\mathcal{R}}_{x,y}=\left(
\begin{array}{cc:cc}
\cos x\theta & -\sin x\theta & 0 & 0 \\
\sin x\theta & \cos x\theta & 0 & 0 \\
\hdashline
0 & 0 & \cos y\theta & -\sin y\theta \\
0 & 0 & \sin y\theta & \cos y\theta \\
\end{array}\right) = \begin{pmatrix}\boldsymbol{\mathcal{R}}_x & 0 \\ 0 & \boldsymbol{\mathcal{R}}_y\end{pmatrix}\end{equation}
很明显,这只是$\boldsymbol{\mathcal{R}}_x$和$\boldsymbol{\mathcal{R}}_y$以分块对角的形式组合在一起,因此也很自然能将它推广到3D甚至更高维度。从实现上来理解就是更简单了,它就是将$\boldsymbol{q},\boldsymbol{k}$都切分为两半(3D就是三等分、4D就是四等分,依此类推),每一半都是$\mathbb{R}^{d/2}$的向量,然后一半做$x$的RoPE-1D,另一半做$y$的RoPE-1D,最后再拼起来。
需要指出的是,从对称性和简洁性考虑,上面构造的$\boldsymbol{\mathcal{R}}_{x,y}$中对$x,y$我们使用了相同的$\theta$,但这原则上是非必须的,在适当情况下我们分别给$x,y$配置略有不同的$\theta$。
强行降维 #
现在我们看到,文本的位置是一个标量$n$,图片的位置则是一个向量$(x,y)$,两者并不一致,因此在处理图文混合输入时就需要一些技巧,来调和两者之间的不一致性。
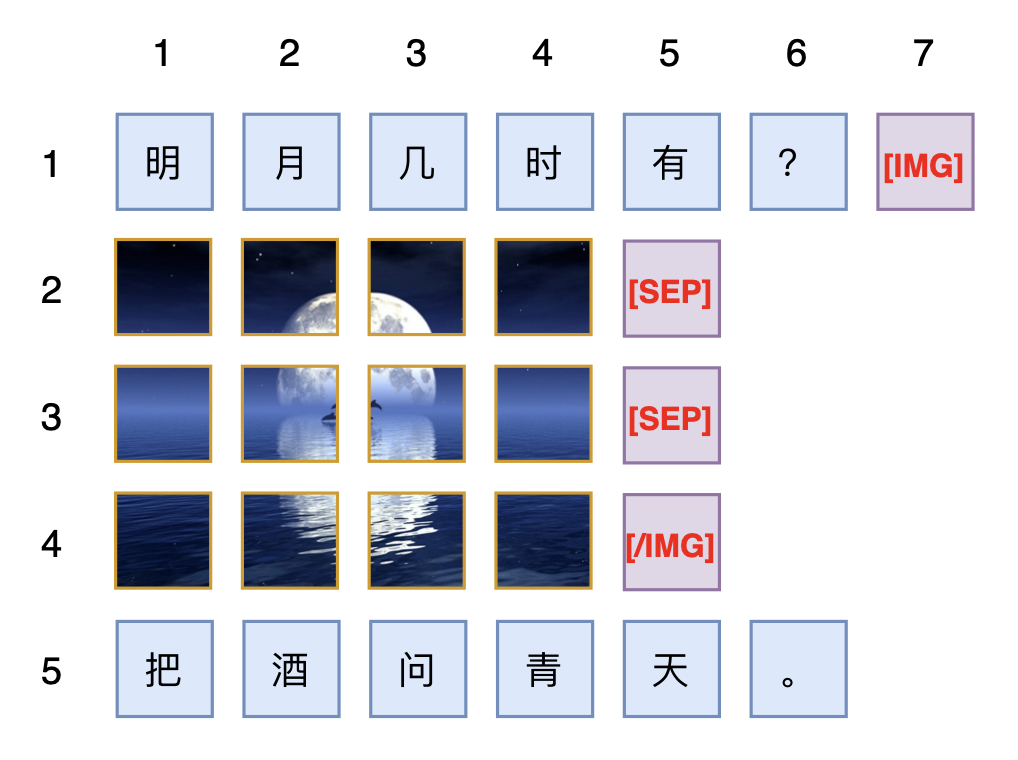
最直接的方案,文章开头已经说了,就是直接展平图片为一维向量序列,然后就当作普通文本来处理,文本怎么加位置编码它就怎么加位置编码。这种思路自然是非常通用的,不限于加RoPE,也可以加任何绝对位置编码,笔者目测已有的一些多模态模型,如Fuyu-8b、Deepseek-VL、Emu2等,都是这样做的,可能细节处理上会有所不同,比如遇到不同行的patch可以考虑加个表示[SEP]的special token来分隔:

文本和图片都展平为一维来处理
这个方案也契合了当前主流的Decoder-Only架构,因为Decoder-Only意味着即便不加位置编码,它也不是置换不变的,因此必须人为指定我们认为最佳的输入顺序,而既然要指定输入顺序了,按照所指定的顺序使用一维的位置编码也是很自然的选择。此外,在纯文本时这种方案的模型跟普通纯文本LLM无异,所以这也允许我们将训练好的文本LLM来继续训练成一个多模态模型。
然而,从笔者的角度看,位置编码的概念本身不应该和Attention的用法绑定,它应该普适于Decoder、Encoder乃至任意的Attention Mask。另一方面,保持位置的二维性才能最大程度上保留我们关于相近位置的先验,比如我们认为位置$(x+1,y)$和$(x,y+1)$都应该跟$(x,y)$具有相近的距离,但如果(先水平后垂直)展平的话,$(x,y)$变为$xw + y$,而$(x+1,y)$和$(x,y+1)$分别变为了$xw+y+w$和$xw+y+1$,前者与$xw + y$的距离就依赖于$w$而后者是固定的$1$。当然,我们还可以指定其他制定顺序,但不管怎么指定顺序,都无法完全兼容所有邻近位置的相近性,毕竟少了一个维度,可表达的相似性就少了很多。
统一升维 #
从向量空间的角度看,一维的标量可以看成一个特殊的二维向量,因此相比于展平为一维,如果我们反过来将所有输入的位置都统一到二维,原则上有更大的操作空间。
为此,我们可以考虑一种常见的排版方式:以图片为分隔符,对文本进行分段,连续的文本都视为一行,图片则视为多行文本,那么整个图文混合输入就相当于一篇多行长文,每个文本token或者图片patch,都有自己所属的行数$x$以及行内的顺序$y$,这就给所有的输入单元(token或者patch)都赋予了一个二维位置$(x,y)$,于是可以统一用RoPE-2D(其他2D形式的位置编码理论上也可以)来编码位置,同时还保持了原本图片位置的二维性。
模拟排版统一构建二维位置坐标
很明显,该方案的主要优点是非常直观,它直接跟实际的视觉排版相对应,便于理解和推广。但它也有一个非常明显的缺点,那就是对于纯文本输入,它无法退化为RoPE-1D,而是变成了$x$始终为1的RoPE-2D,这样从已训练好的文本LLM出发来训练多模态LLM的可行性就值得怀疑。此外,以图片作为分割点的话,当图片比较多时,可能会让文本被分割得过于“支离破碎”,具体表现包括每一段文本的长度波动太大、本该连续的文本被强行换行等,这些都可能成为限制效果的瓶颈。
合二为一 #
如果要无损保留图片patch的位置信息,那么统一到二维然后用RoPE-2D(或者其他2D形式的位置编码)看上去是必然的选择,所以上一节的方案已经是走在了正确的方向上,我们需要进一步思考的是如何能够让它对于纯文本输入能够退化为RoPE-1D,以兼容已有的文本LLM。
首先,我们在前面已经提到过,$\boldsymbol{\mathcal{R}}_{x,y}$是$\boldsymbol{\mathcal{R}}_x$和$\boldsymbol{\mathcal{R}}_y$的分块对角组合,所以$\boldsymbol{\mathcal{R}}_{n,n}$是两个$\boldsymbol{\mathcal{R}}_n$的分块对角组合,而RoPE-1D的$\boldsymbol{\mathcal{R}}_n^{(d\times d)}$也是多个不同$\theta$的$\boldsymbol{\mathcal{R}}_n$的分块对角组合,由此可见,只要我们从$\boldsymbol{\mathcal{R}}_n^{(d\times d)}$选取不同的$\theta$给$x,y$,那么$\boldsymbol{\mathcal{R}}_{n,n}$就可以看成是RoPE-1D(即$\boldsymbol{\mathcal{R}}_n^{(d\times d)}$)的一部分。这样看来,要想RoPE-2D能退化为RoPE-1D,那么文本的位置应该采取$(n,n)$的形式,而不是像上一节那样用其他方式指定一个行号。
然后,在图片内部,我们则使用常规的RoPE-2D,对于单张$w\times h$个patch的图片来说,它的二维位置坐标展平后是
\begin{array}{c|cccc|cccc|c|cccc}
\hline
x & 1 & 1 & \cdots & 1 & 2 & 2 & \cdots & 2 & \quad \cdots \quad & h & h & \cdots & h \\
\hline
y & 1 & 2 & \cdots & w & 1 & 2 & \cdots & w & \quad \cdots \quad & 1 & 2 & \cdots & w \\
\hline
\end{array}
如果这张图片位于一个长度为$L$的句子后面,我们这个句子的最后一个token的位置编码就是$(L,L)$,于是这张接在句子后面的图片的位置编码看上去应该是
\begin{array}{c|cccc|c|cccc}
\hline
x & L+1 & L+1 & \cdots & L+1 & \quad \cdots \quad & L+h & L+h & \cdots & L+h \\
\hline
y & L+1 & L+2 & \cdots & L+w & \quad \cdots \quad & L+1 & L+2 & \cdots & L+w \\
\hline
\end{array}
但这并不完美,因为句子的最后一个token的位置是$(L,L)$,图片第一个patch的位置是$(L+1,L+1)$,它们相差$(1,1)$;假设这张图片后面再接一个句子,那么设该句子的第一个token的位置是$(K,K)$,图片的最后一个patch的位置则是$(L+h,L+w)$,当$w\neq h$时,不管我们怎么设置$K$,都不可能让$(K,K)$与$(L+h,L+w)$的差为$(1,1)$,即图片关于左右的句子存在不对称性,这就显得不够优雅。
为了改进这一点,我们可以将图片的$x,y$分别乘以正数$s,t$:
\begin{array}{c|cccc|cccc|c|cccc}
\hline
x & s & s & \cdots & s & 2s & 2s & \cdots & 2s & \quad \cdots \quad & hs & hs & \cdots & hs \\
\hline
y & t & 2t & \cdots & wt & t & 2t & \cdots & wt & \quad \cdots \quad & t & 2t & \cdots & wt \\
\hline
\end{array}
只要$s,t\neq 0$,那么这个缩放对位置信息是无损的,因此这样的操作是允许的。而引入scale之后,假设句子的最后一个token的位置依旧是$(L,L)$,那么图片的位置同样是上述序列都加上$L$,此时“句子的最后一个token的位置”与“图片第一个patch的位置”之差就是$(s,t)$,如果我们希望“图片后面的句子的第一个token的位置”与“图片最后一个patch的位置”之差也是$(s,t)$,那么就应该有
\begin{equation}\begin{pmatrix}L + hs \\ L + wt \end{pmatrix} + \begin{pmatrix}s \\ t \end{pmatrix} = \begin{pmatrix}K \\ K \end{pmatrix}\quad \Rightarrow \quad (h+1)s = (w+1)t\end{equation}
考虑到$h,w$的任意性,并且希望保证位置ID都是整数的话,那么最简单的一个解自然是$s=w+1,t=h+1$,新句子第一个token的位置将会是$K=L+(w+1)(h+1)$。一个具体的例子如下图所示:
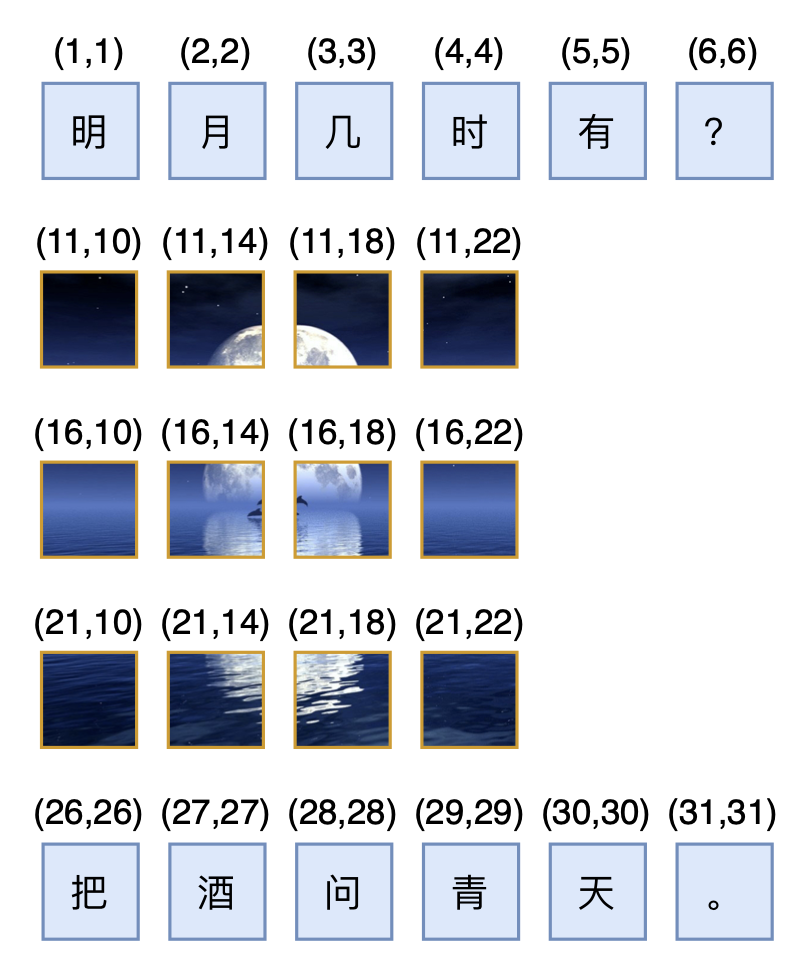
支持退化为RoPE-1D的二维位置
延伸思考 #
左边句子最后一个token的位置是$L$,右边句子第一个token的位置是$K=L+(w+1)(h+1)$,如果中间部分也是一个句子的话,那么可以推出该句子有$(w+1)(h+1)-1$个token,这也等价于说如果两个句子之间夹着一个$w\times h$的图片,那么对这两个句子的相对位置来说等价于隔着一个$(w+1)(h+1)-1$个token的句子。这个数字看起来有点不自然,因为看上去$wh$才是完美答案,但可惜这是保证所有位置ID都是整数的最简单解。如果允许非整数的位置ID,那么可以约定$w\times h$的图片等价于$wh$个token,反过来推出
\begin{equation}s = \frac{wh + 1}{h+1}, \quad t = \frac{wh + 1}{w+1}\end{equation}
可能有读者要问:如果是两张不同大小的图片相邻,是不是就没有这样对称的方案了?这其实也不难,只要每张图片的前后,我们都加入special token来标记,如[IMG]、[/IMG],并且special token当作普通文本token来编码位置,这样就直接避免了两张图片直接相邻的情况(因为按照约定,同一张图片的patch之间必然夹在[IMG]和[/IMG],这两个token当作文本来处理,所以就等价于说每一张图片必然夹在两个文本之间)。此外,上述介绍中没有提及[SEP],如果有需要自行引入即可,事实上只有用patch by patch的自回归方式做图片生成时,才有必要引入[SEP],如果图片单纯是作为输入,或者图片生成用扩散模型来做,那么[SEP]则是多余的。
至此,我们关于将RoPE推广到图文混合输入的推导已经完成,如果需要一个名字,可以将最后的方案称之为“RoPE-Tie(RoPE for Text-image)”。不得不说的是,最后的RoPE-Tie并不算太漂亮,以至于给人一种“雕花”的感觉。从效果上来看,相比直接展平为一维用RoPE-1D,换用RoPE-Tie之后也不见得会有什么提升,它更多是笔者的强迫症的一个产物。所以,对于已经scale到了一定规模的多模态模型,就没有必要做出什么改动了,但如果还没有起步或者刚刚起步,那么不妨尝试一下RoPE-Tie。
文章小结 #
本文讨论了如何将RoPE-1D和RoPE-2D结合起来,来更好地处理图文混合的输入格式,主要思想是通过RoPE-2D支持图片的二维位置指标,并且通过适当的约束,使得在纯文本情况下能退化为常规的RoPE-1D。
转载到请包括本文地址:https://kexue.fm/archives/10040
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Mar. 29, 2024). 《Transformer升级之路:17、多模态位置编码的简单思考 》[Blog post]. Retrieved from https://kexue.fm/archives/10040
@online{kexuefm-10040,
title={Transformer升级之路:17、多模态位置编码的简单思考},
author={苏剑林},
year={2024},
month={Mar},
url={\url{https://kexue.fm/archives/10040}},
}

March 29th, 2024
请问希尔伯特曲线是否可以用在图像的位置编码上呢
好广的想象力!搜了一下希尔伯特曲线,没想到怎么用,有什么就提的想法吗?
March 29th, 2024
[...]Read More [...]
March 31st, 2024
苏老师,这样2D的坐标空间会不会太稀疏了
不会,从2D的角度看,1D的位置全部分布在$y=x$这一条线上,相比于整个平面也很稀疏,所以稀疏都是相对的,取决于你观察的角度。
April 2nd, 2024
如果图片序列长度是固定的,那模型还是能够学到一维展开后的垂直相对位置(前提是图片序列长度固定,位置是否固定有待讨论)。早期vit好像证明过这一点
确实,不论是encoder来patchify还是直接在pixel空间patchify,大部分情况下不加位置编码都可以,但加上位置编码通常会更有利于收敛。
同时,加上位置编码也提高了模型本身的通用性,ViT这种情况不加位置编码也可以,是基于图像边界足够拼合图片的假设(即打乱所有patch后可以重新无损地拼图起来)。极端情况下,存在不满足这个假设的图片。
请问有什么工作是您提到的“encoder来patchify”的吗?不太理解这个做法具体是什么意思
这里是广义的说法,将图像从$w\times h \times 3$的数组变成$s\times t\times d$(其中$s < w, t < h$)的数组,我们都称为广义的“Patchify”。
April 2nd, 2024
你要不要考慮結合 Butterfly Factorization (https://proceedings.mlr.press/v97/dao19a.html),這樣會更稀疏一些。
这个分解之前留意到了,有点意思,还没认真看过。但用在这里具体是怎么用,想起到什么效果?我不大明白~
我在想,如果對 W_{Q} 和 W_{K} 分別做 LQ 分解(QR分解的變體),然後再對 Q_{Q} 和 Q_{K} 矩陣 做 Butterfly 分解,那麼注意力矩陣就內置了 RoPE。換而言之,NoPE 的本質就是 RoPE。
暂时还不了解butterfly factorisation,可能还需要请你科普一下butterfly factorisation的内容(respect)
April 2nd, 2024
苏神,我们最新提出了一种泛化RoPE的理论框架:https://arxiv.org/abs/2403.17729。欢迎批评指教!
欢迎作者莅临。贵作前两天也扫到过,但我有点眼拙,除了将transformer做了复数化,以求与rope更直接结合之外,还有什么特别符合insight的改动或者效果吗?
苏神好!我们的模型主要出发点还是调整query和key之间的语义旋转角ΔS。因为rope的原理是ΔS+ (位置旋转角ΔP)。而transformer不同层间的 ΔS 分布可能差异很大,而RoPE用同一套ΔP去适配所有层的ΔS 可能不是最优解,因此我们去调整不同层的ΔS以寻求更优的融合方式。
简单看了一下论文,根据原文中式(11)和式(12),似乎是在 RoPE 的基础上,每层增加两个可学习参数 $\theta^l$ 和 $b^l$?
我再去读了一下,发现主要的改动就是将Q、K复数化,然后在它们的幅角上加了个参数点乘,然后才应用RoPE?
是的苏神,我们发现这个对辐角的系数很重要!
那最终所有运算都在极坐标下进行吗?加了系数之后的Q、K恢复为实数向量,还是一直保持为复数?
有没有在语言模型任务上试过呢?
是的苏神,我们是将Q,K在极坐标的情况下加了系数和RoPE然后恢复成实向量,语言模型上Loss下降更快,并且有一定提升。当然也有一篇工作是消除了Q,K之间的角度https://openreview.net/forum?id=rhSOxKYq89O,可以看作是我们的一个特例:即将点乘系数设置为0。总之,我们认为Q,K极坐标角的点乘系数有很多值得研究的内容。
@Z. T|comment-24139
CoCA只是消除了Q、K两两分组后,每一对2维向量的角度,但Q、K作为一个整体,依然是有角度的。当然,你这里看上去也同样是每一对2维向量的角度加了一个系数。跟RoPE一样,我同样无法直观理解这样能work的原因,另外就是要确认是否真的有效改进,可能还是要进一步scale up模型才行。
June 27th, 2024
图片后再接句子,第一个token加$(L+h+1,L+w+1)$,这不是非常的自然么,博主为何非要坚持要两个序列方向上刻度一致呢
这样从视觉上来看,就相当于说文本斜着排版,文本的最后一个token接图片的左上角,然后图片的右下角接下一段文本的第一个token。从矩阵的角度看,就是近乎一个对角矩阵的极其稀疏的矩阵,感觉不大符合(我的)直觉。
July 5th, 2024
多种模态之间,做分块的相对位置编码方案怎么样?假设1-n为文本token,n+1-m为图片token,分别准备两组编入位置编码和不编入位置编码的qk,在对角线位置上填入编入位置编码的qk乘积,非对角线上填入原始无pe的qk乘积。这样就避免了设计交叉模态位置编码的困难。
如果你指的是通过cross attention用两种不同的方式处理图片,类似的思路我倒是也想过,但感觉也对应不上你说的“在对角线位置上填入编入位置编码的qk乘积,非对角线上填入原始无pe的qk乘积”呀。
cross attention的话,就不可避免地带来计算量的增加了,总的来说也不算太优雅。
可能是我没表达清楚。相当于算qk score时,只在分块对角位置用添加了pe的qk点乘结果填入,其余位置为不含pe的qk点乘。大致应该长这样:$$
\left[ \begin{matrix}
{{\mathbf{q_1^{pe}} \mathbf{k_1^{pe}} }}
& {{\cdots}} & {{\mathbf{q_1^{pe}} \mathbf{k_n^{pe}} }}
& {{\mathbf{q_1} \mathbf{k_{n+1}} }}
& {{\cdots}} & {{\mathbf{q_1} \mathbf{k_{n+m}} }}
\\
{{\vdots}} & {{\ddots}} & {{\vdots}} & {{\vdots}} & {{\ddots}} & {{\vdots}}
\\
{{\mathbf{q_n^{pe}} \mathbf{k_1^{pe}} }}
& {{\cdots}} & {{\mathbf{q_n^{pe}} \mathbf{k_n^{pe}} }}
& {{\mathbf{q_n} \mathbf{k_{n+1}} }}
& {{\cdots}} & {{\mathbf{q_n} \mathbf{k_{n+m}} }}
\\
{{\mathbf{q_{n+1}} \mathbf{k_1} }}
& {{\cdots}} & {{\mathbf{q_{n+1}} \mathbf{k_n} }}
& {{\mathbf{q_{n+1}^{pe}} \mathbf{k_{n+1}^{pe}} }}
& {{\cdots}} & {{\mathbf{q_{n+1}^{pe}} \mathbf{k_{n+m}^{pe}} }}
\\
{{\vdots}} & {{\ddots}} & {{\vdots}} & {{\vdots}} & {{\ddots}} & {{\vdots}}
\\
{{\mathbf{q_{n+m}} \mathbf{k_1} }}
& {{\cdots}} & {{\mathbf{q_{n+m}} \mathbf{k_n} }}
& {{\mathbf{q_{n+m}^{pe}} \mathbf{k_{n+1}^{pe}} }}
& {{\cdots}} & {{\mathbf{q_{n+m}^{pe}} \mathbf{k_{n+m}^{pe}} }}
\\
\end{matrix} \right]
$$ 这里$n$ 和$m$分别为两种独立模态的序列长度,上标$pe$表示对参与计算的特征向量做了pos-emb adding操作(rope这样的rotary every two当然也是可以的). 这样两种分别加了pe和不加的区分处理,如果是在像flash-attention那样的算子内部做点些微改造,基本上可以认为是不会带来计算量的增加的。
明白了,这就跟我之前想象的一致了。形式上没有问题,就是不大清楚这种不对称性会不会导致注意力出现“断层”。断层这个词可能不大恰当,大致意思就是突然间从带PE跳到不带PE,两者混合起来,Attention会不会有点不连贯的感觉。
哈哈,这词有点形象。有没有用可能需要实做来检验
这种形式不方便实现吧,rope是直接加在$Q$和$K$上的,没法实现一部分有pe一部分没pe吧
在flash attention背景下还是容易实现的。
October 31st, 2024
苏神你好,背景是目前我们在某个性能推理任务中对比了rope2d与摊平使用rope1d的效果,rope2d的准确性比较差;请问在encoder-decoder架构中,enc-dec的cross attention的rope应该怎么写呢?在enc-dec attention中我们目前是根据enc_out与dec_out各自的seq_len进行rope1d
cross attention按照我的看法,是不应该加位置编码的,因为cross的输入之间的位置信号其实没什么必然联系,加位置编码不符合认知。
谢谢,其实有很多任务输入和输出是一一对应的,比如资源分配根据每个对象的一些特征预测每个对象获得的资源,也就是说输入中x=i的token与输出位置i是对应的,这个时候我们是否需要在cross attention里增加rope;
这种特定背景下确实可能加位置编码比较好,我理解做法跟self attention没有什么区别。具体是遇到什么问题了吗?
September 13th, 2025
一年后来挖坟,请问Qwen Image提出的 multimodal scalable RoPE (Sec 2.4 in https://arxiv.org/pdf/2508.02324) 是不是和这里的RoPE-Tie非常类似?不由得佩服苏老师的前瞻性。
最新的多模态位置编码,思想都大同小异。