






29
Jun
UniVAE:基于Transformer的单模型、多尺度的VAE模型
By 苏剑林 | 2021-06-29 | 75117位读者 | 引用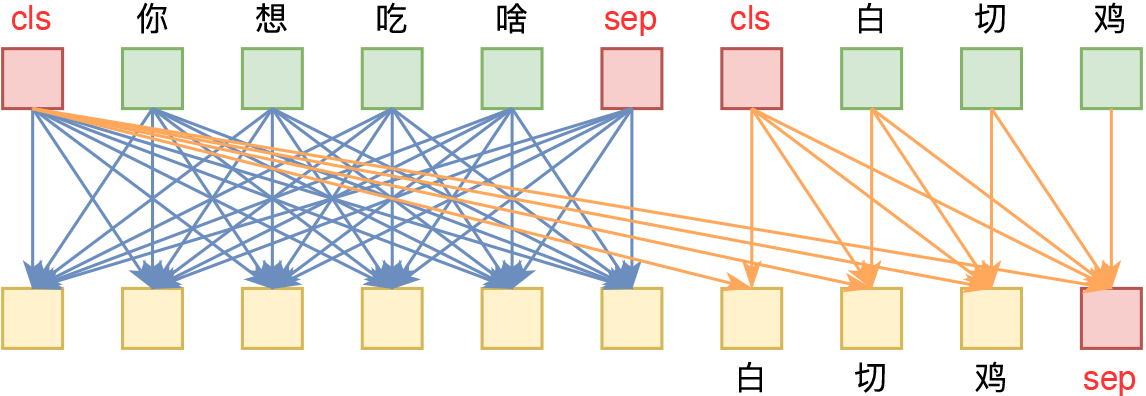
19
Jul
用开源的人工标注数据来增强RoFormer-Sim
By 苏剑林 | 2021-07-19 | 143253位读者 | 引用大家知道,从SimBERT到SimBERTv2(RoFormer-Sim),我们算是为中文文本相似度任务建立了一个还算不错的基准模型。然而,SimBERT和RoFormer-Sim本质上都只是“弱监督”模型,跟“无监督”类似,我们不能指望纯弱监督的模型能达到完美符合人的认知效果。所以,为了进一步提升RoFormer-Sim的效果,我们尝试了使用开源的一些标注数据来辅助训练。本文就来介绍我们的探索过程。
有的读者可能想:有监督有啥好讲的?不就是直接训练么?说是这么说,但其实并没有那么“显然易得”,还是有些“雷区”的,所以本文也算是一份简单的“扫雷指南”吧。
前情回顾
笔者发现,自从SimBERT发布后,读者问得最多的问题大概是:
为什么“我喜欢北京”跟“我不喜欢北京”相似度这么高?它们不是意思相反吗?
9
Aug
线性Transformer应该不是你要等的那个模型
By 苏剑林 | 2021-08-09 | 104490位读者 | 引用在本博客中,我们已经多次讨论过线性Attention的相关内容。介绍线性Attention的逻辑大体上都是:标准Attention具有$\mathcal{O}(n^2)$的平方复杂度,是其主要的“硬伤”之一,于是我们$\mathcal{O}(n)$复杂度的改进模型,也就是线性Attention。有些读者看到线性Attention的介绍后,就一直很期待我们发布基于线性Attention的预训练模型,以缓解他们被BERT的算力消耗所折腾的“死去活来”之苦。
然而,本文要说的是:抱有这种念头的读者可能要失望了,标准Attention到线性Attention的转换应该远远达不到你的预期,而BERT那么慢的原因也并不是因为标准Attention的平方复杂度。
BERT之反思
按照直观理解,平方复杂度换成线性复杂度不应该要“突飞猛进”才对嘛?怎么反而“远远达不到预期”?出现这个疑惑的主要原因,是我们一直以来都没有仔细评估一下常规的Transformer模型(如BERT)的整体计算量。
6
Aug
Transformer升级之路:5、作为无限维的线性Attention
By 苏剑林 | 2021-08-06 | 23936位读者 | 引用在《Performer:用随机投影将Attention的复杂度线性化》中我们了解到Google提出的Performer模型,它提出了一种随机投影方案,可以将标准Attention转化为线性Attention,并保持一定的近似。理论上来说,只要投影的维度足够大,那么可以足够近似标准Attention。换句话说,标准Attention可以视作一个无限维的线性Attention。
本文将介绍笔者构思的另外两种将标准Attention转换为无限维线性Attention的思路,不同于Performer的随机投影,笔者构思的这两种方案都是确定性的,并且能比较方便地感知近似程度。
简要介绍
关于标准Attention和线性Attention,这里就不多做介绍了,还不了解的读者可以参考笔者之前的文章《线性Attention的探索:Attention必须有个Softmax吗?》和《Transformer升级之路:3、从Performer到线性Attention》。简单来说,标准Attention的计算方式为
\begin{equation}a_{i,j}=\frac{e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_j e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
17
Aug
浅谈Transformer的初始化、参数化与标准化
By 苏剑林 | 2021-08-17 | 177963位读者 | 引用前几天在训练一个新的Transformer模型的时候,发现怎么训都不收敛了。经过一番debug,发现是在做Self Attention的时候$\boldsymbol{Q}\boldsymbol{K}^{\top}$之后忘记除以$\sqrt{d}$了,于是重新温习了一下为什么除以$\sqrt{d}$如此重要的原因。当然,Google的T5确实是没有除以$\sqrt{d}$的,但它依然能够正常收敛,那是因为它在初始化策略上做了些调整,所以这个事情还跟初始化有关。
藉着这个机会,本文跟大家一起梳理一下模型的初始化、参数化和标准化等内容,相关讨论将主要以Transformer为心中展开。
采样分布
初始化自然是随机采样的的,所以这里先介绍一下常用的采样分布。一般情况下,我们都是从指定均值和方差的随机分布中进行采样来初始化。其中常用的随机分布有三个:正态分布(Normal)、均匀分布(Uniform)和截尾正态分布(Truncated Normal)。
22
Oct
CAN:借助先验分布提升分类性能的简单后处理技巧
By 苏剑林 | 2021-10-22 | 151181位读者 | 引用顾名思义,本文将会介绍一种用于分类问题的后处理技巧——CAN(Classification with Alternating Normalization),出自论文《When in Doubt: Improving Classification Performance with Alternating Normalization》。经过笔者的实测,CAN确实多数情况下能提升多分类问题的效果,而且几乎没有增加预测成本,因为它仅仅是对预测结果的简单重新归一化操作。
有趣的是,其实CAN的思想是非常朴素的,朴素到每个人在生活中都应该用过同样的思想。然而,CAN的论文却没有很好地说清楚这个思想,只是纯粹形式化地介绍和实验这个方法。本文的分享中,将会尽量将算法思想介绍清楚。
思想例子
假设有一个二分类问题,模型对于输入$a$给出的预测结果是$p^{(a)} = [0.05, 0.95]$,那么我们就可以给出预测类别为$1$;接下来,对于输入$b$,模型给出的预测结果是$p^{(b)}=[0.5,0.5]$,这时候处于最不确定的状态,我们也不知道输出哪个类别好。
8
Nov
模型优化漫谈:BERT的初始标准差为什么是0.02?
By 苏剑林 | 2021-11-08 | 92638位读者 | 引用前几天在群里大家讨论到了“Transformer如何解决梯度消失”这个问题,答案有提到残差的,也有提到LN(Layer Norm)的。这些是否都是正确答案呢?事实上这是一个非常有趣而综合的问题,它其实关联到挺多模型细节,比如“BERT为什么要warmup?”、“BERT的初始化标准差为什么是0.02?”、“BERT做MLM预测之前为什么还要多加一层Dense?”,等等。本文就来集中讨论一下这些问题。
梯度消失说的是什么意思?
在文章《也来谈谈RNN的梯度消失/爆炸问题》中,我们曾讨论过RNN的梯度消失问题。事实上,一般模型的梯度消失现象也是类似,它指的是(主要是在模型的初始阶段)越靠近输入的层梯度越小,趋于零甚至等于零,而我们主要用的是基于梯度的优化器,所以梯度消失意味着我们没有很好的信号去调整优化前面的层。
12
Jan
CoSENT(二):特征式匹配与交互式匹配有多大差距?
By 苏剑林 | 2022-01-12 | 91893位读者 | 引用一般来说,文本匹配有交互式(Interaction-based)和特征式(Representation-based)两种实现方案,其中交互式是指将两个文本拼接在一起当成单文本进行分类,而特征式则是指两个句子分别由编码器编码为句向量后再做简单的融合处理(算cos值或者接一个浅层网络)。通常的结论是,交互式由于使得两个文本能够进行充分的比较,所以它准确性通常较好,但明显的缺点是在检索场景的效率较差;而特征式则可以提前计算并缓存好句向量,所以它有着较高的效率,但由于句子间的交互程度较浅,所以通常效果不如交互式。
上一篇文章笔者介绍了CoSENT,它本质上也是一种特征式方案,并且相比以往的特征式方案效果有所提高。于是笔者的好胜心就上来了:CoSENT能比得过交互式吗?特征式相比交互式的差距有多远呢?本文就来做个比较。
自动阈值
在文章《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,我们评测CoSENT所用的指标是Spearman系数,它是一个只依赖于预测结果相对顺序的指标,不依赖于阈值,比较适合检索场景的评测。但如果评测指标是accuracy或者F1这些分类指标,则必须确定一个阈值,将预测结果大于这个数的预测结果视为正、小于则为负,然后才能计算指标。在二分类的场景,我们用二分法就可以有效地确定这个阈值。

最近评论