






27
Feb
配置不同的学习率,LoRA还能再涨一点?
By 苏剑林 | 2024-02-27 | 54398位读者 | 引用LoRA(Low-Rank Adaptation)是当前LLM的参数高效微调手段之一,此前我们在《梯度视角下的LoRA:简介、分析、猜测及推广》也有过简单讨论。这篇文章我们来学习LoRA的一个新结论:
给LoRA的两个矩阵分配不同的学习率,LoRA的效果还能进一步提升。
该结论出自最近的论文《LoRA+: Efficient Low Rank Adaptation of Large Models》(下称“LoRA+”)。咋看之下,该结论似乎没有什么特别的,因为配置不同的学习率相当于引入了新的超参数,通常来说只要引入并精调超参数都会有提升。“LoRA+”的特别之处在于,它从理论角度肯定了这个必要性,并且断定最优解必然是右矩阵的学习率大于左矩阵的学习率。简而言之,“LoRA+”称得上是理论指导训练并且在实践中确实有效的经典例子,值得仔细学习一番。
结论简析
假设预训练参数为$W_0 \in \mathbb{R}^{n\times m}$,如果使用全量参数微调,那么增量也是一个$n\times m$矩阵。为了降低参数量,LoRA将更新量约束为低秩矩阵,即设$W=W_0 + AB$,其中$A\in\mathbb{R}^{n\times r},B\in\mathbb{R}^{r\times m}$以及有$r\ll \min(n,m)$,用新的$W$替换模型原有参数,然后固定$W_0$不变,训练的时候只更新$A,B$,如下图所示:
$$\style{display: inline-block; width: 24ex; padding: 10ex 0; border: 1px solid #6C8EBF; background-color: #DAE8FC}{W_0\in\mathbb{R}^{n\times m}} \quad + \quad \style{display: inline-block; width: 8ex; padding: 10ex 0; border: 1px solid #D79B00; background-color: #FFE6CC}{A\in\mathbb{R}^{n\times r}}\quad\times\quad \style{display: inline-block; width: 24ex; padding: 3ex 0; border: 1px solid #D79B00; background-color: #FFE6CC}{B\in\mathbb{R}^{r\times m}}$$
13
May
缓存与效果的极限拉扯:从MHA、MQA、GQA到MLA
By 苏剑林 | 2024-05-13 | 159114位读者 | 引用前几天,幻方发布的DeepSeek-V2引起了大家的热烈讨论。首先,最让人哗然的是1块钱100万token的价格,普遍比现有的各种竞品API便宜了两个数量级,以至于有人调侃“这个价格哪怕它输出乱码,我也会认为这个乱码是一种艺术”;其次,从模型的技术报告看,如此便宜的价格背后的关键技术之一是它新提出的MLA(Multi-head Latent Attention),这是对GQA的改进,据说能比GQA更省更好,也引起了读者的广泛关注。
接下来,本文将跟大家一起梳理一下从MHA、MQA、GQA到MLA的演变历程,并着重介绍一下MLA的设计思路。
MHA
MHA(Multi-Head Attention),也就是多头注意力,是开山之作《Attention is all you need》所提出的一种Attention形式,可以说它是当前主流LLM的基础工作。在数学上,多头注意力MHA等价于多个独立的单头注意力的拼接,假设输入的(行)向量序列为$\boldsymbol{x}_1,\boldsymbol{x}_2,\cdots,\boldsymbol{x}_l$,其中$\boldsymbol{x}_i\in\mathbb{R}^d$,那么MHA可以形式地记为
17
Apr
生成扩散模型漫谈(二十三):信噪比与大图生成(下)
By 苏剑林 | 2024-04-17 | 38214位读者 | 引用上一篇文章《生成扩散模型漫谈(二十二):信噪比与大图生成(上)》中,我们介绍了通过对齐低分辨率的信噪比来改进noise schedule,从而改善直接在像素空间训练的高分辨率图像生成(大图生成)的扩散模型效果。而这篇文章的主角同样是信噪比和大图生成,但做到了更加让人惊叹的事情——直接将训练好低分辨率图像的扩散模型用于高分辨率图像生成,不用额外的训练,并且效果和推理成本都媲美直接训练的大图模型!
这个工作出自最近的论文《Upsample Guidance: Scale Up Diffusion Models without Training》,它巧妙地将低分辨率模型上采样作为引导信号,并结合了CNN对纹理细节的平移不变性,成功实现了免训练高分辨率图像生成。
思想探讨
我们知道,扩散模型的训练目标是去噪(Denoise,也是DDPM的第一个D)。按我们的直觉,去噪这个任务应该是分辨率无关的,换句话说,理想情况下低分辨率图像训练的去噪模型应该也能用于高分辨率图像去噪,从而低分辨率的扩散模型应该也能直接用于高分辨率图像生成。
24
May
重温SSM(一):线性系统和HiPPO矩阵
By 苏剑林 | 2024-05-24 | 60206位读者 | 引用前几天,笔者看了几篇介绍SSM(State Space Model)的文章,才发现原来自己从未认真了解过SSM,于是打算认真去学习一下SSM的相关内容,顺便开了这个新坑,记录一下学习所得。
SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的S4,不算太老,而SSM最新最火的变体大概是去年的Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前我们在《Google新作试图“复活”RNN:RNN能否再次辉煌?》介绍过的LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。
尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。
24
Jul
Monarch矩阵:计算高效的稀疏型矩阵分解
By 苏剑林 | 2024-07-24 | 29497位读者 | 引用在矩阵压缩这个问题上,我们通常有两个策略可以选择,分别是低秩化和稀疏化。低秩化通过寻找矩阵的低秩近似来减少矩阵尺寸,而稀疏化则是通过减少矩阵中的非零元素来降低矩阵的复杂性。如果说SVD是奔着矩阵的低秩近似去的,那么相应地寻找矩阵稀疏近似的算法又是什么呢?
接下来我们要学习的是论文《Monarch: Expressive Structured Matrices for Efficient and Accurate Training》,它为上述问题给出了一个答案——“Monarch矩阵”,这是一簇能够分解为若干置换矩阵与稀疏矩阵乘积的矩阵,同时具备计算高效且表达能力强的特点,论文还讨论了如何求一般矩阵的Monarch近似,以及利用Monarch矩阵参数化LLM来提高LLM速度等内容。
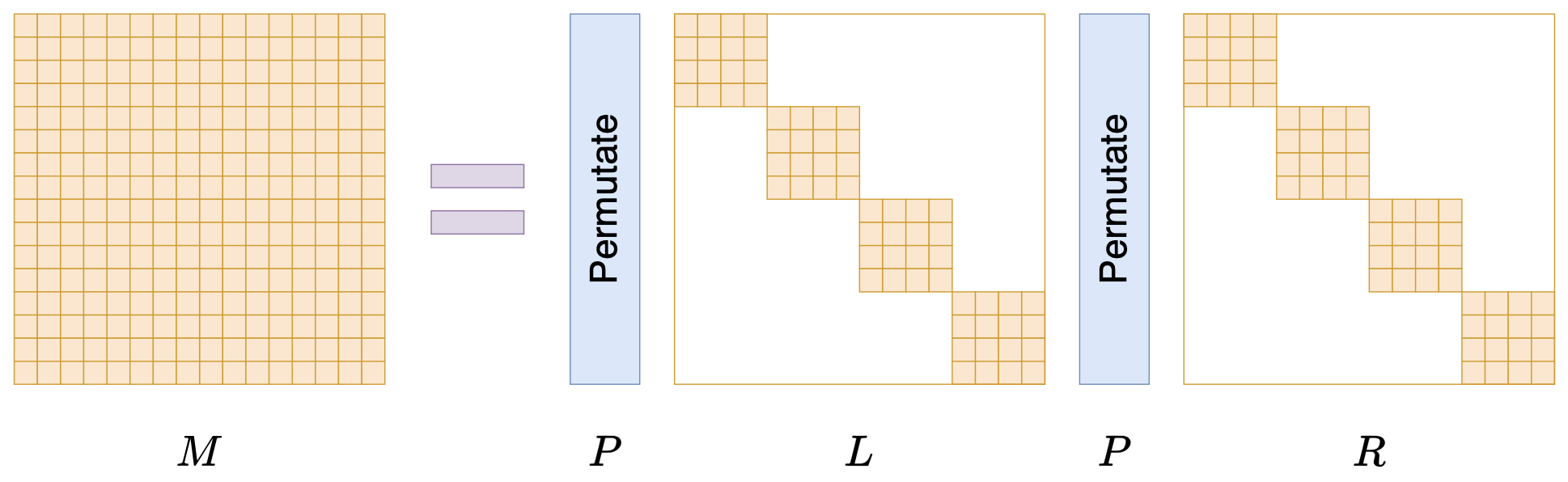
Monarch矩阵形式M=PLPR
值得指出的是,该论文的作者也正是著名的Flash Attention的作者Tri Dao,其工作几乎都在致力于改进LLM的性能,这篇Monarch也是他主页上特意展示的几篇论文之一,单从这一点看就非常值得学习一番。
6
Aug
通向最优分布之路:概率空间的最小化
By 苏剑林 | 2024-08-06 | 22946位读者 | 引用当要求函数的最小值时,我们通常会先求导函数然后寻找其零点,比较幸运的情况下,这些零点之一正好是原函数的最小值点。如果是向量函数,则将导数改为梯度并求其零点。当梯度零点不易求得时,我们可以使用梯度下降来逐渐逼近最小值点。
以上这些都是无约束优化的基础结果,相信不少读者都有所了解。然而,本文的主题是概率空间中的优化,即目标函数的输入是一个概率分布,这类目标的优化更为复杂,因为它的搜索空间不再是无约束的,如果我们依旧去求解梯度零点或者执行梯度下降,所得结果未必能保证是一个概率分布。因此,我们需要寻找一种新的分析和计算方法,以确保优化结果能够符合概率分布的特性。
对此,笔者一直以来也感到颇为头疼,所以近来决定”痛定思痛“,针对概率分布的优化问题系统学习了一番,最后将学习所得整理在此,供大家参考。
29
Jul
对齐全量微调!这是我看过最精彩的LoRA改进(二)
By 苏剑林 | 2024-07-29 | 29694位读者 | 引用前两周笔者写了《对齐全量微调!这是我看过最精彩的LoRA(一)》(当时还没有编号“一”),里边介绍了一个名为“LoRA-GA”的LoRA变体,它通过梯度SVD来改进LoRA的初始化,从而实现LoRA与全量微调的对齐。当然,从理论上来讲,这样做也只能尽量对齐第一步更新后的$W_1$,所以当时就有读者提出了“后面的$W_2,W_3,\cdots$不管了吗?”的疑问,当时笔者也没想太深入,就单纯觉得对齐了第一步后,后面的优化也会严格一条较优的轨迹走。
有趣的是,LoRA-GA才出来没多久,arXiv上就新出了《LoRA-Pro: Are Low-Rank Adapters Properly Optimized?》,其所提的LoRA-Pro正好能回答这个问题!LoRA-Pro同样是想着对齐全量微调,但它对齐的是每一步梯度,从而对齐整条优化轨迹,这正好是跟LoRA-GA互补的改进点。
对齐全量
本文接着上一篇文章的记号和内容进行讲述,所以这里仅对上一节的内容做一个简单回顾,不再详细重复介绍。LoRA的参数化方式是
\begin{equation}W = (W_0 - A_0 B_0) + AB\end{equation}
15
Sep
低秩近似之路(一):伪逆
By 苏剑林 | 2024-09-15 | 26877位读者 | 引用可能很多读者跟笔者一样,对矩阵的低秩近似有种熟悉而又陌生的感觉。熟悉是因为,低秩近似的概念和意义都不难理解,加之目前诸如LoRA等基于低秩近似的微调技术遍地开花,让低秩近似的概念在耳濡目染间就已经深入人心;然而,低秩近似所覆盖的内容非常广,在低秩近似相关的论文中时常能看到一些不熟悉但又让我们叹为观止的新技巧,这就导致了一种似懂非懂的陌生感。
因此,在这个系列文章中,笔者将试图系统梳理一下矩阵低秩近似相关的理论内容,以补全对低秩近似的了解。而在第一篇文章中,我们主要介绍低秩近似系列中相对简单的一个概念——伪逆。
优化视角
伪逆(Pseudo Inverse),也称“广义逆(Generalized Inverse)”,顾名思义就是“广义的逆矩阵”,它实际上是“逆矩阵”的概念对于不可逆矩阵的推广。

最近评论