






23
Mar
Transformer升级之路:2、博采众长的旋转式位置编码
By 苏剑林 | 2021-03-23 | 346558位读者 | 引用上一篇文章中,我们对原始的Sinusoidal位置编码做了较为详细的推导和理解,总的感觉是Sinusoidal位置编码是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。
本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。
11
Apr
无监督语义相似度哪家强?我们做了个比较全面的评测
By 苏剑林 | 2021-04-11 | 158518位读者 | 引用一月份的时候,笔者写了《你可能不需要BERT-flow:一个线性变换媲美BERT-flow》,指出无监督语义相似度的SOTA模型BERT-flow其实可以通过一个简单的线性变换(白化操作,BERT-whitening)达到。随后,我们进一步完善了实验结果,写成了论文《Whitening Sentence Representations for Better Semantics and Faster Retrieval》。这篇博客将对这篇论文的内容做一个基本的梳理,并在5个中文语义相似度任务上进行了补充评测,包含了600多个实验结果。
方法概要
BERT-whitening的思路很简单,就是在得到每个句子的句向量$\{x_i\}_{i=1}^N$后,对这些矩阵进行一个白化(也就是PCA),使得每个维度的均值为0、协方差矩阵为单位阵,然后保留$k$个主成分,流程如下图:
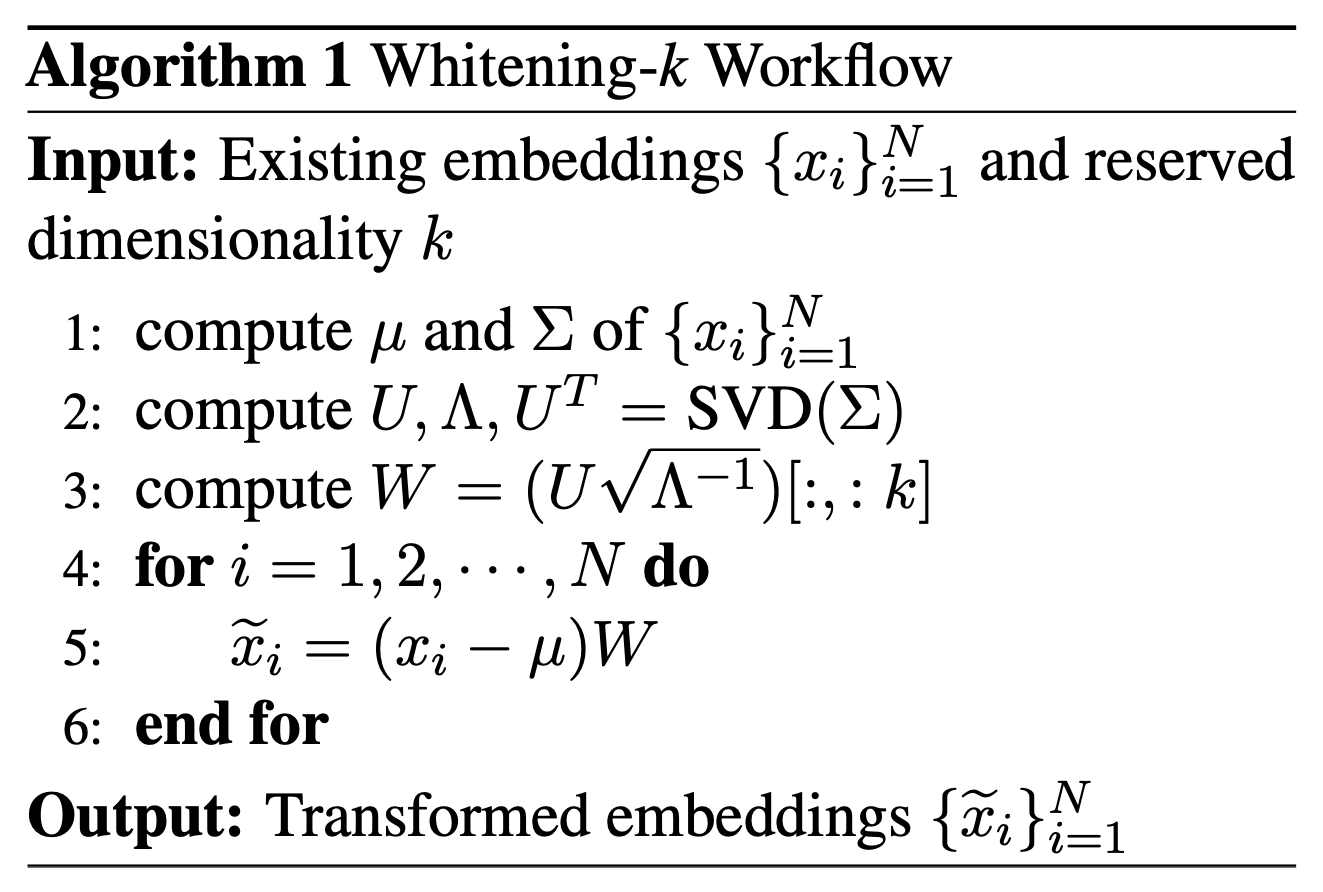
BERT-whitening的基本流程
22
Apr
Transformer升级之路:3、从Performer到线性Attention
By 苏剑林 | 2021-04-22 | 62196位读者 | 引用看过笔者之前的文章《线性Attention的探索:Attention必须有个Softmax吗?》和《Performer:用随机投影将Attention的复杂度线性化》的读者,可能会觉得本文的标题有点不自然,因为是先有线性Attention然后才有Performer的,它们的关系为“Performer是线性Attention的一种实现,在保证线性复杂度的同时保持了对标准Attention的近似”,所以正常来说是“从线性Attention到Performer”才对。
然而,本文并不是打算梳理线性Attention的发展史,而是打算反过来思考Performer给线性Attention所带来的启示,所以是“从Performer到线性Attention”。
激活函数
线性Attention的常见形式是
\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V})_i = \frac{\sum\limits_{j=1}^n \text{sim}(\boldsymbol{q}_i, \boldsymbol{k}_j)\boldsymbol{v}_j}{\sum\limits_{j=1}^n \text{sim}(\boldsymbol{q}_i, \boldsymbol{k}_j)} = \frac{\sum\limits_{j=1}^n \phi(\boldsymbol{q}_i)^{\top} \varphi(\boldsymbol{k}_j)\boldsymbol{v}_j}{\sum\limits_{j=1}^n \phi(\boldsymbol{q}_i)^{\top} \varphi(\boldsymbol{k}_j)}\end{equation}
26
Apr
中文任务还是SOTA吗?我们给SimCSE补充了一些实验
By 苏剑林 | 2021-04-26 | 254085位读者 | 引用今年年初,笔者受到BERT-flow的启发,构思了成为“BERT-whitening”的方法,并一度成为了语义相似度的新SOTA(参考《你可能不需要BERT-flow:一个线性变换媲美BERT-flow》,论文为《Whitening Sentence Representations for Better Semantics and Faster Retrieval》)。然而“好景不长”,在BERT-whitening提交到Arxiv的不久之后,Arxiv上出现了至少有两篇结果明显优于BERT-whitening的新论文。
第一篇是《Generating Datasets with Pretrained Language Models》,这篇借助模板从GPT2_XL中无监督地构造了数据对来训练相似度模型,个人认为虽然有一定的启发而且效果还可以,但是复现的成本和变数都太大。另一篇则是本文的主角《SimCSE: Simple Contrastive Learning of Sentence Embeddings》,它提出的SimCSE在英文数据上显著超过了BERT-flow和BERT-whitening,并且方法特别简单~
那么,SimCSE在中文上同样有效吗?能大幅提高中文语义相似度的效果吗?本文就来做些补充实验。
1
May
GlobalPointer:用统一的方式处理嵌套和非嵌套NER
By 苏剑林 | 2021-05-01 | 343501位读者 | 引用(注:本文的相关内容已整理成论文《Global Pointer: Novel Efficient Span-based Approach for Named Entity Recognition》,如需引用可以直接引用英文论文,谢谢。)
本文将介绍一个称为GlobalPointer的设计,它利用全局归一化的思路来进行命名实体识别(NER),可以无差别地识别嵌套实体和非嵌套实体,在非嵌套(Flat NER)的情形下它能取得媲美CRF的效果,而在嵌套(Nested NER)情形它也有不错的效果。还有,在理论上,GlobalPointer的设计思想就比CRF更合理;而在实践上,它训练的时候不需要像CRF那样递归计算分母,预测的时候也不需要动态规划,是完全并行的,理想情况下时间复杂度是$\mathcal{O}(1)$!
简单来说,就是更漂亮、更快速、更强大!真有那么好的设计吗?不妨继续看看。
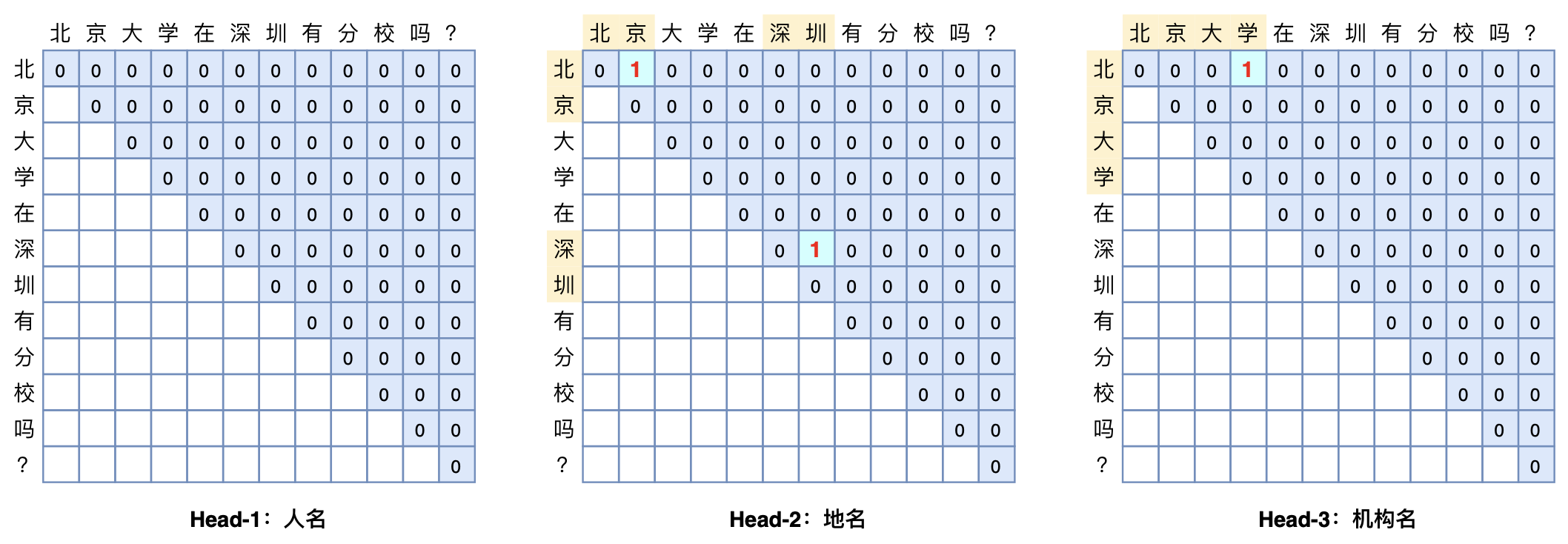
GlobalPointer多头识别嵌套实体示意图
10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 123614位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。
17
May
变分自编码器(七):球面上的VAE(vMF-VAE)
By 苏剑林 | 2021-05-17 | 151004位读者 | 引用在《变分自编码器(五):VAE + BN = 更好的VAE》中,我们讲到了NLP中训练VAE时常见的KL散度消失现象,并且提到了通过BN来使得KL散度项有一个正的下界,从而保证KL散度项不会消失。事实上,早在2018年的时候,就有类似思想的工作就被提出了,它们是通过在VAE中改用新的先验分布和后验分布,来使得KL散度项有一个正的下界。
该思路出现在2018年的两篇相近的论文中,分别是《Hyperspherical Variational Auto-Encoders》和《Spherical Latent Spaces for Stable Variational Autoencoders》,它们都是用定义在超球面的von Mises–Fisher(vMF)分布来构建先后验分布。某种程度上来说,该分布比我们常用的高斯分布还更简单和有趣~
KL散度消失
我们知道,VAE的训练目标是
\begin{equation}\mathcal{L} = \mathbb{E}_{x\sim \tilde{p}(x)} \Big[\mathbb{E}_{z\sim p(z|x)}\big[-\log q(x|z)\big]+KL\big(p(z|x)\big\Vert q(z)\big)\Big]
\end{equation}
27
Sep
关于维度公式“n > 8.33 log N”的可用性分析
By 苏剑林 | 2021-09-27 | 44112位读者 | 引用在之前的文章《最小熵原理(六):词向量的维度应该怎么选择?》中,我们基于最小熵思想推导出了一个词向量维度公式“$n > 8.33\log N$”,然后在《让人惊叹的Johnson-Lindenstrauss引理:应用篇》中我们进一步指出,该结果与JL引理所给出的$\mathcal{O}(\log N)$是吻合的。
既然理论上看上去很完美,那么自然就有读者发问了:实验结果如何呢?8.33这个系数是最优的吗?本文就对此问题的相关内容做一个简单汇总。
词向量
首先,我们可以直接,当$N$为10万时,$8.33\log N\approx 96$,当$N$为500万时,$8.33\log N\approx 128$。这说明,至少在数量级上,该公式给出的结果是很符合我们实际所用维度的,因为在词向量时代,我们自行训练的词向量维度也就是100维左右。可能有读者会质疑,目前开源的词向量多数是300维的,像BERT的Embedding层都达到了768维,这不是明显偏离了你的结果了?

最近评论