






1
May
【不可思议的Word2Vec】 4.不一样的“相似”
By 苏剑林 | 2017-05-01 | 150631位读者 | 引用相似度的定义
当用Word2Vec得到词向量后,一般我们会用余弦相似度来比较两个词的相似程度,定义为
$$\cos (\boldsymbol{x}, \boldsymbol{y}) = \frac{\boldsymbol{x}\cdot\boldsymbol{y}}{|\boldsymbol{x}|\times|\boldsymbol{y}|}$$
有了这个相似度概念,我们既可以比较任意两个词之间的相似度,也可以找出跟给定词最相近的词语。这在gensim的Word2Vec中,由most_similar函数实现。
等等!我们很快给出了相似度的计算公式,可是我们居然还没有“定义”相似!连相似都没有定义,怎么就得到了评估相似度的数学公式了呢?
要注意,这不是一个可以随意忽略的问题。很多时候我们都不知道我们干的是什么,就直接去干了。好比上一篇文章说到提取关键词,相信很多人都未曾想过,什么是关键词,难道就仅仅说关键词就是很“关键”的词?而如果想到,关键词就是用来估计文章大概讲什么的,这样我们就得到一种很自然的关键词定义
$$keywords = \mathop{\text{argmax}}_{w\in s}p(s|w)$$
进而可以用各种方法对它建模。
回到本文的主题来,相似度怎么定义呢?答案是:看场景定义所需要的相似。
17
May
如何“扒”站?手把手教你爬百度百科~
By 苏剑林 | 2017-05-17 | 34220位读者 | 引用
27
May
【不可思议的Word2Vec】5. Tensorflow版的Word2Vec
By 苏剑林 | 2017-05-27 | 116023位读者 | 引用本文封装了一个比较完整的Word2Vec,其模型部分使用tensorflow实现。本文的目的并非只是再造一次Word2Vec这个轮子,而是通过这个例子来熟悉tensorflow的写法,并且测试笔者设计的一种新的softmax loss的效果,为后面研究语言模型的工作做准备。
不同的地方
Word2Vec的基本的数学原理,请移步到《【不可思议的Word2Vec】 1.数学原理》一文查看。本文的主要模型还是CBOW或者Skip-Gram,但在loss设计上有所不同。本文还是使用了完整的softmax结构,而不是huffmax softmax或者负采样方案,但是在训练softmax时,使用了基于随机负采样的交叉熵作为loss。这种loss与已有的nce_loss和sampled_softmax_loss都不一样,这里姑且命名为random softmax loss。
另外,在softmax结构中,一般是$\text{softmax}(Wx+b)$这样的形式,考虑到$W$矩阵的形状事实上跟词向量矩阵的形状是一样的,因此本文考虑了softmax层与词向量层共享权重的模型(这时候直接让$b$为0),这种模型等效于原有的Word2Vec的负采样方案,也类似于glove词向量的词共现矩阵分解,但由于使用了交叉熵损失,理论上收敛更快,而且训练结果依然具有softmax的预测概率意义(相比之下,已有的Word2Vec负样本模型训练完之后,最后模型的输出值是没有意义的,只有词向量是有意义的。)。同时,由于共享了参数,因此词向量的更新更为充分,读者不妨多多测试这种方案。
6
Jun
通用爬虫探索(一):适用一般网站的爬虫
By 苏剑林 | 2017-06-06 | 39622位读者 | 引用这是笔者参加今年的泰迪杯C题的论文简化版。虽然最后只评上了一个安慰奖,但个人感觉里边有些思路对爬虫工作还是有些参加价值的。所以还是放出来供大家参考一下。
简介
一个爬虫可以分为两个步骤:1.把网页下载下来;2.从网页中把所需要的信息抽取出来。这两个步骤都存在相应的技术难点。对于第一个步骤,难度在于如何应对各大网站的反爬虫措施,如访问频率过高则封IP或者给出验证码等,这需要根据不同网站的不同反爬虫措施来设计,理论上不存在通用的可能性。对于第二个步骤,传统的做法是设计对应的正则表达式,随着网站设计上日益多样化,正则表达式的写法也相应变得困难。
显然,想要得到一个通用的爬虫方案,用传统的正则表达式的方案是相当困难的。但如果我们跳出正则表达式的思维局限,从全局的思维来看网站,结合DOM树来解析,那么可以得到一个相当通用的方案。因此,本文的主要内容,是围绕着爬虫的第二个步骤进行展开。本文的工作分为两个部分进行:首先,提出了一个适用于一般网站的信息抽取方案,接着,将这个方案细化,落实到论坛的信息抽取上。
6
Jun
通用爬虫探索(二):落实到论坛爬取上
By 苏剑林 | 2017-06-06 | 26074位读者 | 引用前述的方案,如果爬取的页面仅仅有单一的有效区域,如博客页、新闻页等,那么基本上来说已经足够了。但是,诸如像论坛这样的具有比较明显的层次划分的网站,我们需要进一步细分。因为经过上述步骤,我们虽然能够把有效文本提取出来,但结果是把所有文本放在一块了。
深度优先
而为了给内容进一步“分块”,我们还需要利用DOM树的位置信息。如上一篇的DOM树图,我们需要给每个节点和叶子都编号,即我们需要一个遍历DOM树的方式。这里我们采用“深度优先”的方案。
深度优先搜索算法(英语:Depth-First-Search,简称DFS)是一种用于遍历或搜索树或图的算法。沿着树的深度遍历树的节点,尽可能深的搜索树的分支。当节点v的所在边都己被探寻过,搜索将回溯到发现节点v的那条边的起始节点。这一过程一直进行到已发现从源节点可达的所有节点为止。如果还存在未被发现的节点,则选择其中一个作为源节点并重复以上过程,整个进程反复进行直到所有节点都被访问为止。
8
Jun
互怼的艺术:从零直达WGAN-GP
By 苏剑林 | 2017-06-08 | 310155位读者 | 引用前言
GAN,全称Generative Adversarial Nets,中文名是生成对抗式网络。对于GAN来说,最通俗的解释就是“伪造者-鉴别者”的解释,如艺术画的伪造者和鉴别者。一开始伪造者和鉴别者的水平都不高,但是鉴别者还是比较容易鉴别出伪造者伪造出来的艺术画。但随着伪造者对伪造技术的学习后,其伪造的艺术画会让鉴别者识别错误;或者随着鉴别者对鉴别技术的学习后,能够很简单的鉴别出伪造者伪造的艺术画。这是一个双方不断学习技术,以达到最高的伪造和鉴别水平的过程。 然而,稍微深入了解的读者就会发现,跟现实中的造假者不同,造假者会与时俱进地使用新材料新技术来造假,而GAN最神奇而又让人困惑的地方是它能够将随机噪声映射为我们所希望的正样本,有噪声就有正样本,这不是无本生意吗,多划算~
另一个情况是,自从WGAN提出以来,基本上GAN的主流研究都已经变成了WGAN上去了,但WGAN的形式事实上已经跟“伪造者-鉴别者”差得比较远了。而且WGAN虽然最后的形式并不复杂,但是推导过程却用到了诸多复杂的数学,使得我无心研读原始论文。这迫使我要找从一条简明直观的线索来理解GAN。幸好,经过一段时间的思考,有点收获。
8
Aug
【备忘】谈谈dropout
By 苏剑林 | 2017-08-08 | 35718位读者 | 引用其实这只是一篇备忘...
dropout是深度学习中防止过拟合的一项有效措施,当然,就其思想而言,dropout其实也不仅仅可以用在深度学习中,还可以用在传统的机器学习方法中,只不过在深度学习的神经网络框架下,dropout显得更为自然罢了。
做了什么
dropout是怎么操作的?一般来做,对于输入的张量$x$,dropout就是将部分元素置零,然后将置零后的结果做一个尺度变换。具体来说,以Keras的Dropout(0.6)(x)为例,实际上等价于numpy做的这件事情
import numpy as np
x = np.random.random((10,100)) #模拟一个batch_size=10、维度为100的输入
def Dropout(x, drop_proba):
return x*np.random.choice(
[0,1],
x.shape,
p=[drop_proba,1-drop_proba]
)/(1.-drop_proba)
print Dropout(x, 0.6)
3
Sep
开学啦!咱们来做完形填空~(讯飞杯)
By 苏剑林 | 2017-09-03 | 213167位读者 | 引用前言
从今年开始,CCL会议将计划同步举办评测活动。笔者这段时间在一创业公司实习,公司也报名参加这个评测,最后实现上就落在我这里,今年的评测任务是阅读理解,名曰《第一届“讯飞杯”中文机器阅读理解评测》。虽说是阅读理解,但事实上任务比较简单,是属于完形填空类型的,即一段材料中挖了一个空,从上下文中选一个词来填入这个空中。最后我们的模型是单系统排名第6,验证集准确率为73.55%,测试集准确率为75.77%,大家可以在这里观摩排行榜。(“广州火焰信息科技有限公司”就是文本的模型)
事实上,这个数据集和任务格式是哈工大去年提出的,所以这次的评测也是哈工大跟科大讯飞一起联合举办的。哈工大去年的论文《Consensus Attention-based Neural Networks for Chinese Reading Comprehension》就研究过另一个同样格式但不同内容的数据集,是用通用的阅读理解模型做的(通用的阅读理解是指给出材料和问题,从材料中找到问题的答案,完形填空可以认为是通用阅读理解的一个非常小的子集)。
虽然,在这次评测任务的介绍中,评测方总有意无意地引导我们将这个问题理解为阅读理解问题。但笔者觉得,阅读理解本身就难得多,这个就一完形填空,只要把它作为纯粹的完形填空题做就是了,所以本文仅仅是采用类似语言模型的做法来做。这种做法的好处是思路简明直观,计算量低(在笔者的GTX1060上可以跑到batch size为160),便于实验。
模型
回到模型上,我们的模型其实比较简单,完全紧扣了“从上下文中选一个词来填空”这一思想,示意图如下。
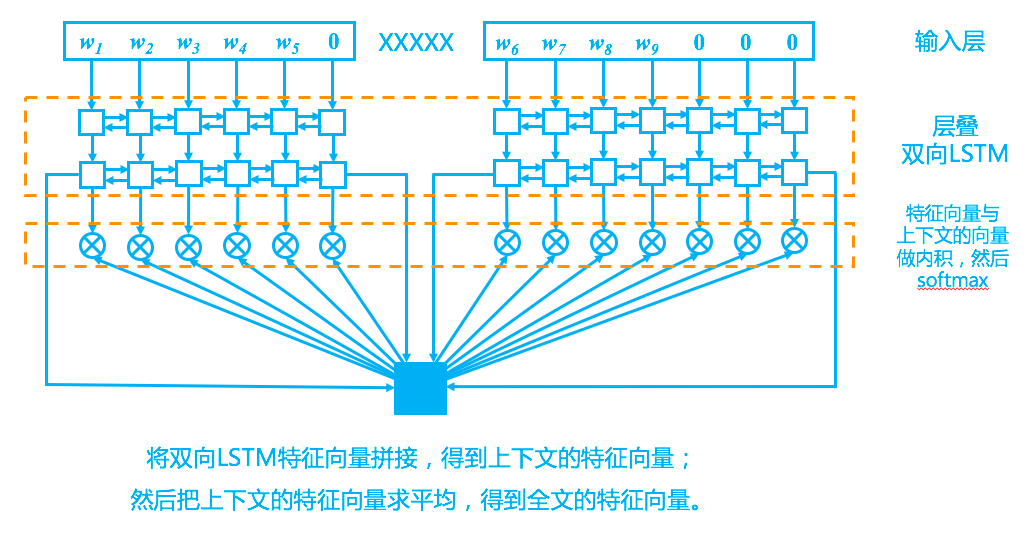
完形填空模型

最近评论