






28
Nov
《自然极值》系列——4.费马点问题
By 苏剑林 | 2010-11-28 | 116527位读者 |通过上面众多的文字描述,也许你还不大了解这两个原理有何美妙之处,也或者你已经迫不及待地想去应用它们却不知思路。为了不至于让大家产生“审美疲劳”,接下来我们将试图利用这两个原理对费马点问题进行探讨,看看原理究竟是怎么发挥作用的。运用的关键在于:如何通过适当的变换将其与光学或势能联系起来。
费马点问题
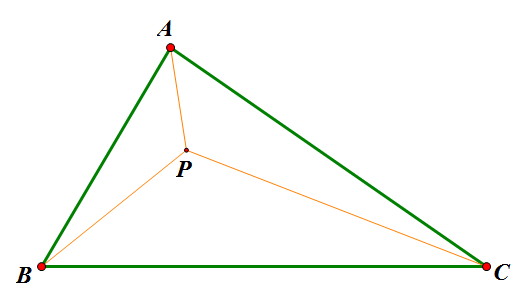
传统费马点问题是指在ΔABC中寻找点P,使得$AP+BP+CP$最小的问题;而广义的费马点则改成使$k_1 AP+k_2 BP+k_3 CP$最小。这是很具有现实意义的,是“在三个村庄之间建立一个中转站,如何才能使运送成为最低”之类的最优问题。我们将从光学和势能两个角度对这个问题进行探讨(也许有的读者已经阅读过了利用重力的原理来求解费马点,但是我想光学的方法依然会是你眼前一亮的。)
一、“光解”费马点
我们发现广义费马点中所求的$kAP+mBP+nCP$与折射定律中$\frac{PO}{v_1}+\frac{QO}{v_2}$在形式上十分相似,于是我们想到可以应用折射定律。首先将其改成
$$\frac{AP}{(1/{k_1})}+\frac{BP}{(1/{k_2})}+\frac{CP}{(1/{k_3})},v_1=1/{k_1},v_2=1/{k_2},v_3=1/{k_3}$$
费马原理是关于两者和的极值,而费马点是三项的。为了能够应用费马原理,我们需要先“定”一个长度。如下图:
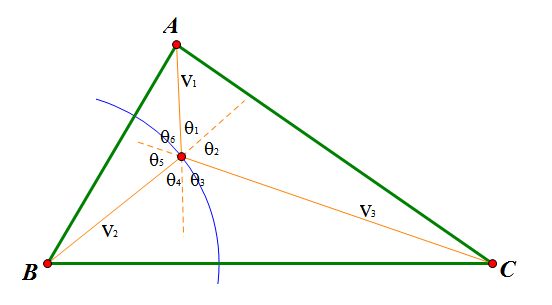
“光解”费马点
假定已经给出BP长度,那么我们以它为半径作圆弧,并假设圆弧就是一面特别的反射镜(经它反射后光速会变)。于是我们的问题就变成了:从圆弧上找出P点,使得$k_1 AP+k_3 CP$最短。
根据费马原理,我们要选择光路。这个光路就是我们在前边“费马原理”一小节中所得到的“折反射定律”推论,即令
$$\frac{\sin \theta_1}{v_1}=\frac{\sin\theta_2}{v_3}\Rightarrow k_1 \sin\theta_1=k_3 \sin\theta_2$$
同样可以将BP换成AP、CP进行如上设置,即有
$$\begin{aligned}k_3 \sin\theta_3=k_2 \sin\theta_4 \\ k_2 \sin\theta_5=k_1 \sin\theta_6\end{aligned}$$
根据“对顶角相等”以及“相邻三个角之和为π ”,即得
$$\begin{aligned}\frac{\sin\theta_1}{k_3}=\frac{\sin\theta_5}{k_1};\frac{\sin\theta_3}{k_2}=\frac{\sin\theta_1}{k_3};\frac{\sin\theta_5}{k_1}=\frac{\sin\theta_3}{k_2} \\ \theta_1+\theta_3+\theta_5=\pi\end{aligned}$$
可见,$\theta_1,\theta_3,\theta_5$正是以$k_3,k_2,k_1$为对边的三角形的三个内角。至此,BoJone认为问题已经解决。剩下的细节将留给各位思考(不应该将所有的奥妙都揭示出来,因为这样未免过于单调了)。
二、“势解”费马点
设想将ΔABC水平放置,高度为h;将三条长度为l的绳子一端系在一起,另一端分别系一个重$k_1,k_2,k_3$的重物。如图,使他们必须分别穿过A、B、C三点。
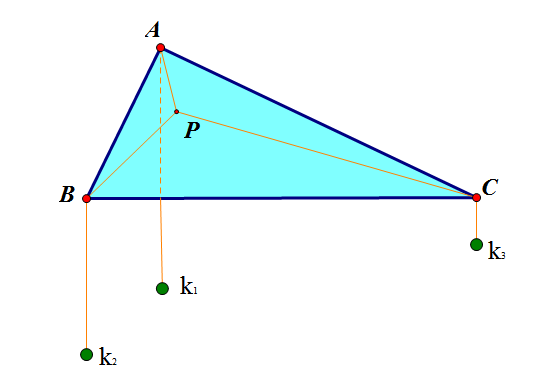
“势解”费马点
在重力作用下,它们会趋于平衡状态,即势能最小,即要求$k_1 [h-(l-AP)]+k_2 [h-(l-BP)]+k_3 [h-(l-CP)]$最小(重力势能$E_p=Gh$,中括号内分别正是每个重物的高度),等价于$k_1 AP+k_2 BP+k_3 CP$最小。
由平衡态公理,稳定后三者受力平衡,即三条绳子的结点处合外力应该为0。于是我们得到了求解答案:它既可以写成我们在“光解”时的形式,也可以为了计算的方便写成:
$k_1^2+k_2^2+2k_1 k_2 cos\angle APB=k_3^2$(力的平行四边形法则)
其他两个类似,不再赘述。至此,两个角度,两种解法,一个问题,OK!
多谈一点:
不论是费马原理还是平衡态公理,都是物理的极值,读者需要运用你们的非凡想象力,将数学极值问题与其联系起来。当然,这个方法并不是万能的,因为它们本来就不是为数学研究准备的。我们研究它们,是为了领略科学之美,方便我们的计算和解答,并企图做出一些新的发现。而系统化、精细化的工作,并不是我们的任务(当然,有兴趣的朋友也可以去完成)
附上一道比较有趣的题目,读者可以运用这两个原理进行思考解答:
找出锐角三角形的内接三角形中周长最短者。
欢迎各位读者思考!
转载到请包括本文地址:https://kexue.fm/archives/1076
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Nov. 28, 2010). 《《自然极值》系列——4.费马点问题 》[Blog post]. Retrieved from https://kexue.fm/archives/1076
@online{kexuefm-1076,
title={《自然极值》系列——4.费马点问题},
author={苏剑林},
year={2010},
month={Nov},
url={\url{https://kexue.fm/archives/1076}},
}

November 28th, 2010
真没想到应用费马原理竟会得到如此叹为观止的结果!“重水河”问题中那个考虑管道、河道修建造价后修合成厂的内容有解决方法了。
November 28th, 2010
找出锐角三角形的内接三角形中周长最短者。我没记错的话是某年的一道冬令营题目。我看过解法,用纯粹数学是很难的。
在纯粹数学范畴内,使用“调和-几何-算术-平方”平均不等式,也可以得到相对简单的解法
是我记错了,原题是内接三角形的最长边的最小值
November 28th, 2010
即要求$k_1 (l-AP)+k_2 (l-BP)+k_3 (l-CP)$最大
这是为什么啊,好像没有讲清楚吧。
稍稍修改了一些,应该容易懂一点了。
November 29th, 2010
不过光解法似乎有个不妙的地方:一旦$k_3$,$k_2$,$k_1$无法组成一个三角形,那么就求不出角的度数了。所以有空了我再看看势解法能不能解决这个问题。
别忘了,一旦$k_3 > k_1 +k_2$,“势解”的话,三个重物也不能保持平衡,所以所求点便落到了其中一个顶点上。
嗯,我想到一点点了。会不会是:当一条线的单位份量大于另外两条的单位份量之和时,费马点就落到份量大的所在的那一顶点上。
$k_3=k_1+k_2$时也会出现这种情况
November 30th, 2010
找出锐角三角形的内接三角形中周长最短者。
我想到了,用一弹簧套在三角形三条边上,弹簧会缩到最短。
不过我算出的结果有点复杂,不知有没有算错。
我经过三天多的捣鼓,最终认为:把三角形的边当作镜面,当三角形边上某点D发出的光线经过另外两条边,分别在E、F发生反射后又返回了D,则三角形DEF是周长最短的。
我那样算也是得到这样的结果
其实你们都是对的,答案是三角形以三条高的垂足为顶点的三角形
谢谢提醒。我又琢磨了好久,发现原来延长DF可得出此作法。
January 30th, 2015
我验证了一下,若K1=8,k2=8,k3=6,AB=560,∠BAC=22°,∠ACB=127°,∠ABC=31°,怎么计算出来,有无穷多个解,但是从解中找了几个数验证,却是P点与C点重合时最小,为什么呢?