






9
Jun
捉弄计划的失败——单摆周期
By 苏剑林 | 2010-06-09 | 57613位读者 |
老式机械摆钟
“滴答滴答,滴答滴答——”当我们看到家里的摆钟来回摆动,并且能够准确地报时的时候,有没有想过其中的奥妙呢?
有一天,你想捉弄一下妈妈,把钟摆系上一个重物,心想着钟一定会走得更快,妈妈就会乱套了。可是很快你会失望地发现,摆钟依然准时地走着,没有任何异常,时间仿佛在宣告他的不可控制。你感到非常纳闷:为什么我的计划会失败呢?
据说,世界上第一个研究单摆的人是伽利略,他通过多次实验得出结论:单摆的周期只取决于摆绳的长度,和摆的重量无关。这是你明白了,原来要捉弄妈妈,应该要增加钟摆长度才对...^_^
现在我们来分析一下这个单摆....
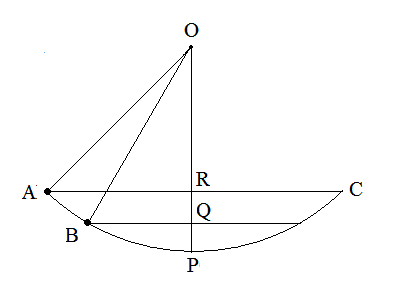
单摆示意图
设单摆的长度为l,在下落过程中只考虑重力因素,那么机械能是守恒的。点A是始点,此时速度为0;当摆下落到B点后,速度为v,动能为$1/2 mv^2$,动能是由重力势能转化而来的,设$RQ=h=l(\cos\theta-\cos\theta_0)$,重力势能的减少量为$mgh=mgl(\cos\theta-\cos\theta_0)$。于是我们可以列出
$$\begin{aligned}v^2=2gl(\cos\theta-\cos\theta_0)=(\frac{ds}{dt})^2=(l\frac{d\theta}{dt})^2 \\ \frac{d\theta}{dt}=\sqrt{\frac{2g}{l}}\sqrt{\cos\theta-\cos\theta_0}\end{aligned}$$
利用$cos\theta=1-2sin^2 \frac{\theta}{2}$,可以变换成
$$\frac{dt}{d\theta}=1/2 \sqrt{\frac{l}{g}}\frac{1}{\sqrt{\sin^2 \frac{\theta_0}{2}-\sin^2 \frac{\theta}{2}}}$$
对于摆来说,一个周期T定义为从A点到达C点再回到A点所用的时间,由于从A—P与从P—C所用时间是相同的,所以$T=4T_{AP}$,即
$$T=4\int_0^{\theta_0} 1/2 \sqrt{\frac{l}{g}}\frac{d\theta}{\sqrt{\sin^2 \frac{\theta_0}{2}-\sin^2 \frac{\theta}{2}}}$$
单摆动画
实际上,对于不同的$\theta_0$,这个积分的结果是不一样的,但是为什么高中书本上都说周期和角度无关呢?当$\theta$比较小的时候,我们用关系式$sin^2 \frac{\theta}{2}\approx (\frac{\theta}{2})^2$,替换后变成
$$T=4\sqrt{\frac{l}{g}}\int_0^{\theta_0} \frac{d\theta}{\sqrt{\theta_0^2-\theta^2}}$$
由定积分的知识可以知道,结果为$T=2\pi \sqrt{\frac{l}{g}}$,这正是伽利略的结果,与质量、初始角度无关。
如果需要精确的算法,可以从以下方向思考:
令$sin\frac{\theta_0}{2}=k,sin\frac{\theta}{2}=k sin\varphi$,$\varphi \in(0,\frac{\pi}{2})$,则$1/2 cos\frac{\theta}{2}d\theta=kcos\varphi$,即
$$d\theta=\frac{2k \cos\varphi d\varphi }{\sqrt{1-k^2 \sin^2 \varphi}}$$
代入后得到
$$T=4\sqrt{\frac{l}{g}}\int_0^{\frac{\pi}{2}} \frac{1}{\sqrt{1-k^2 \sin^2 \varphi}}$$
这类积分成为“第一类椭圆积分”。其结果为:
$$T=2\pi\sqrt{\frac{l}{g}}(1+\frac{1}{2^2}\sin^2 \frac{\theta}{2}+\frac{1\cdot 3^2}{2^2\cdot 4^2}\sin^4 \frac{\theta}{2}+...)$$
如果只取到第一项,那么就是刚开始的近似公式。推导过程可以查阅大学的《数学分析》教程,或者参考下边的图片。
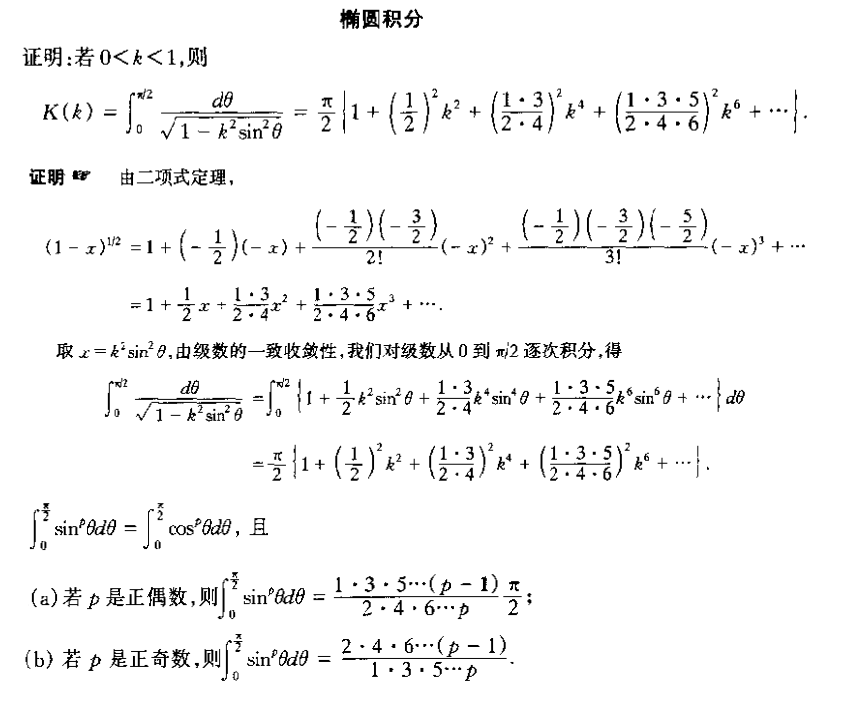
第一类椭圆积分
转载到请包括本文地址:https://kexue.fm/archives/674
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jun. 09, 2010). 《捉弄计划的失败——单摆周期 》[Blog post]. Retrieved from https://kexue.fm/archives/674
@online{kexuefm-674,
title={捉弄计划的失败——单摆周期},
author={苏剑林},
year={2010},
month={Jun},
url={\url{https://kexue.fm/archives/674}},
}

June 14th, 2010
课本上说那个公式叫惠更斯公式
这种方法太复杂了吧
这是从相对严格的数学和物理理论角度进行推导。
我比较反感书本上的粗略公式。
我比较喜欢对一些定理进行比较严密的推导——哪怕最后的结果也只能是近似的。
July 20th, 2010
据说,若不考虑各种摩擦阻滞情况,只有在摆线曲面上滚动的球滚动周期才是严格等时的,不像单摆要考虑摆动幅度的大小。