






27
Jun
从动力学角度看优化算法(一):从SGD到动量加速
By 苏剑林 | 2018-06-27 | 226123位读者 |在这个系列中,我们来关心优化算法,而本文的主题则是SGD(stochastic gradient descent,随机梯度下降),包括带Momentum和Nesterov版本的。对于SGD,我们通常会关心的几个问题是:
SGD为什么有效?
SGD的batch size是不是越大越好?
SGD的学习率怎么调?
Momentum是怎么加速的?
Nesterov为什么又比Momentum稍好?
...
这里试图从动力学角度分析SGD,给出上述问题的一些启发性理解。
梯度下降 #
既然要比较谁好谁差,就需要知道最好是什么样的,也就是说我们的终极目标是什么?
训练目标分析 #
假设全部训练样本的集合为$\boldsymbol{S}$,损失度量为$L(\boldsymbol{x};\boldsymbol{\theta})$,其中$\boldsymbol{x}$代表单个样本,而$\boldsymbol{\theta}$则是优化参数,那么我们可以构建损失函数
$$L(\boldsymbol{\theta}) = \frac{1}{|\boldsymbol{S}|}\sum_{\boldsymbol{x}\in\boldsymbol{S}} L(\boldsymbol{x};\boldsymbol{\theta})\tag{1}$$
而训练的终极目标,则是找到$L(\boldsymbol{\theta})$的一个全局最优点(这里的最优是“最小”的意思)。
GD与ODE #
为了完成这个目标,我们可以用梯度下降法(gradient descent,GD):
$$\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \gamma \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\tag{2}$$
其中$\gamma > 0$称为学习率,这里刚好也是迭代的步长(后面我们会看到步长不一定等于学习率)。梯度下降有多种理解方式,由于一般都有$\gamma \ll 1$,所以这里我们将它改变为
$$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\tag{3}$$
那么左边就近似于$\boldsymbol{\theta}$的导数(假设它是时间$t$的函数),于是我们可以得到ODE动力系统:
$$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{4}$$
而$(2)$则是$(4)$的一个欧拉解法。这样一来,梯度下降实际上就是用欧拉解法去求解动力系统$(4)$,由于$(4)$是一个保守动力系统,因此它最终可以收敛到一个不动点(让$\dot{\boldsymbol{\theta}}=0$),并且可以证明稳定的不动点是一个极小值点(但未必是全局最小的)。
随机梯度下降 #
这里表明,随机梯度下降可以用一个随机微分方程来半定性、半定量地分析。
从GD到SGD #
$(2)$我们一般称为“全量梯度下降”,因为它需要所有样本来计算梯度,这是梯度下降的一个显著缺点:当样本成千上万时,每迭代一次需要的成本太大,甚至可能达到难以进行。于是我们想随机从$\boldsymbol{S}$中随机抽取一个子集$\boldsymbol{R}\subseteq \boldsymbol{S}$,然后只用$\boldsymbol{R}$去计算梯度并完成单次迭代。我们记
$$L_{\boldsymbol{R}}(\boldsymbol{\theta}) = \frac{1}{|\boldsymbol{R}|}\sum_{\boldsymbol{x}\in\boldsymbol{R}} L(\boldsymbol{x};\boldsymbol{\theta})\tag{5}$$
然后公式$(2)$变为
$$\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \gamma \nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})\tag{6}$$
注意$L$的最小值才是我们的目标,而$L_{\boldsymbol{R}}$则是一个随机变量,$\nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})$只是原来$\nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})$的一个估计。这样做能不能得到合理的结果呢?
从SGD到SDE #
这里我们假设
$$\nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n}) - \nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})=\boldsymbol{\xi}_n\tag{7}$$
服从一个方差为$\sigma^2$的正态分布,注意这只是一个近似描述,主要是为了半定性、半定量分析。经过这样假设,随机梯度下降相当于在动力系统$(4)$中引入了高斯噪声:
$$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}) + \sigma \boldsymbol{\xi}\tag{8}$$
其中$\boldsymbol{\xi}$服从标准正态分布。原来的动力系统是一个ODE,现在变成了SDE(随机微分方程),我们称之为“朗之万方程”。当然,其实噪声的来源不仅仅是随机子集带来的估算误差,每次迭代的学习率大小也会带来噪声。
在噪声的高斯假设下,这个方程的解是怎样的呢?原来的ODE的解是一条确定的轨线,现在由于引入了一个随机噪声,因此解也是随机的,可以解得平衡状态的概率分布为
$$P(\boldsymbol{\theta}) \sim \exp \left(-\frac{L(\boldsymbol{\theta})}{\sigma^2}\right)\tag{9}$$
求解过程可以参考一般的随机动力学教程,我们只用到这个结果就好。
结果启发 #
从$(8)$式中我们可以得到一些有意义的结果。首先我们看到,原则上来说这时候的$\boldsymbol{\theta}$已经不是一个确定值,而是一个概率分布,而且原来$L(\boldsymbol{\theta})$的极小值点,刚好现在变成了$P(\boldsymbol{\theta})$的极大值点。这说明如果我们无限长地执行梯度下降的话,理论上$\boldsymbol{\theta}$能走遍所有可能的值,并且在$L(\boldsymbol{\theta})$的各个“坑”中的概率更高。
$\sigma^2$是梯度的方差,显然这个方差是取决于batch size的,根据定义$(7)$,batch size越大方差越小。而在$(9)$式中,$\sigma^2$越大,说明$P(\boldsymbol{\theta})$的图像越平缓,即越接近均匀分布,这时候$\boldsymbol{\theta}$可能就到处跑;当$\sigma^2$越小时,原来$L(\boldsymbol{\theta})$的极小值点的区域就越突出,这时候$\boldsymbol{\theta}$就可能掉进某个“坑”里不出来了。
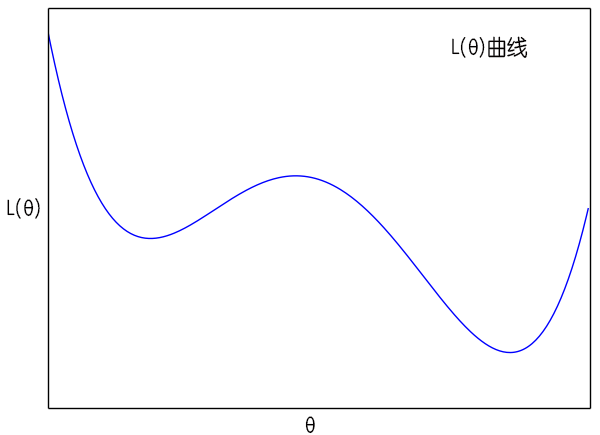
L(θ)曲线
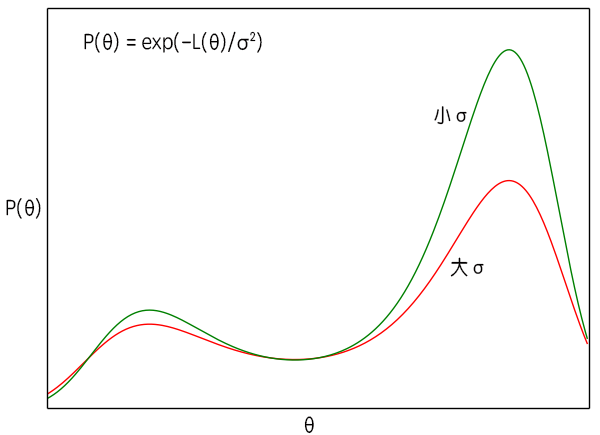
exp(-L(θ))曲线
这样分析的话,理论上来说,我们一开始要让batch size小一些,那么噪声方差$\sigma^2$就会大一些,越接近均匀分布,算法就会遍历更多的区域,随着迭代次数的增加,慢慢地就会越来越接近最优区域,这时候方差应该要下降,使得极值点更为突出。也就是说,有可能的话,batch size应该要随着迭代次数而缓慢增加。这就部分地解释了去年Google提出来的结果《学界 | 取代学习率衰减的新方法:谷歌大脑提出增加Batch Size》,不过batch size增加会大幅度增加计算成本,所以我们一般增加到一定量也就不去调整了。
当然,从图中可以看到,当进入稳定下降区域时,每次迭代的步长$\gamma$(学习率)就不应该超过“坑”的宽度,而$\sigma^2$越小,坑也就越窄,这也表明学习率应该要随着迭代次数的增加而降低。另外$\gamma$越大也部分地带来噪声,因此$\sigma^2$降低事实上也就意味着我们要降低学习率。
所以分析结果就是:
条件允许情况下,在使用SGD时,开始使用小batch size和大学习率,然后让batch size慢慢增加,学习率慢慢减小。
至于增大、减少的策略,就要靠各位的炼丹水平了。
动量加速 #
众所周知,相比Adam等自适应学习率算法,纯SGD优化是很慢的,而引入动量可以加速SGD的迭代。它也有一个漂亮的动力学解释。
从一阶到二阶 #
从前面的文字我们知道,SGD和GD在迭代格式上没有什么差别,所以要寻求SGD的加速,我们只需要寻求GD的加速,然后将全量梯度换成随机梯度就行了。而$(2)$式到$(4)$式的过程我们可以知道,GD将求$L(\boldsymbol{\theta})$的最小值问题变成了ODE方程$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})$的迭代求解问题。
那么,为什么一定要是一阶的呢?二阶的$\ddot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})$行不?
为此,我们考虑一般的
$$\ddot{\boldsymbol{\theta}} + \lambda \dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{10}$$
这样就真正地对应一个(牛顿)力学系统了,其中$\lambda > 0$引入了类似摩擦力的作用。我们来分析这样的系统跟原来GD的一阶ODE$(4)$与$(10)$有什么差别。
首先,从不动点的角度看,$(10)$最终收敛到的稳定不动点(让$\ddot{\boldsymbol{\theta}}=\dot{\boldsymbol{\theta}}=0$),确实也是$L(\boldsymbol{\theta})$的一个极小值点。试想一下,一个小球从山顶滚下来,会自动掉到山谷又爬升,但是由于摩擦阻力的存在,最终就停留在山谷了。注意,除非算法停不了,否则一旦算法停了,那么一定是一个山谷(也有可能是山顶、鞍点,但从概率上来讲则是比较小的),但绝对不可能是半山腰,因为半山腰的话,还存在势能,由能量守恒定律,它可以转化为动能,所以不会停下来。
因此收敛情况跟一阶的GD应该是没有差别的,所以只要比较它们俩的收敛速度。
GD+Momentum #
我们将$(10)$等价地改写为
$$\dot{\boldsymbol{\theta}}=\boldsymbol{\eta},\quad \dot{\boldsymbol{\eta}}=-\lambda \boldsymbol{\eta} - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{11}$$
我们将$\dot{\boldsymbol{\theta}}$离散化为
$$\dot{\boldsymbol{\theta}}\approx \frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma}\tag{12}$$
那么$\boldsymbol{\eta}$要怎么处理呢?$\boldsymbol{\eta}_n$?不对不对,$(\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n})/\gamma$作为$n$时刻的导数只有一阶近似($\mathcal{O}(\gamma)$),而作为$n+1/2$时刻的导数则有二阶近似($\mathcal{O}(\gamma^2)$)。所以,更准确地有:
$$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma}=\boldsymbol{\eta}_{n+1/2}\tag{13}$$
类似地,从$(11)$式的第二个式子,我们导出下面的结果,同样具有二阶近似
$$\frac{\boldsymbol{\eta}_{n+1/2}-\boldsymbol{\eta}_{n-1/2}}{\gamma}=-\lambda\left(\frac{\boldsymbol{\eta}_{n+1/2}+\boldsymbol{\eta}_{n-1/2}}{2}\right)- \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_n)\tag{14}$$
总而言之,为了追求高精度,$(\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n})/\gamma$是$\boldsymbol{\theta}$的$n+1/2$时刻的导数,$(\boldsymbol{\eta}_{n+1/2}-\boldsymbol{\eta}_{n-1/2})/\gamma$是$\boldsymbol{\eta}$的$n$时刻的导数,而$(\boldsymbol{\eta}_{n+1/2}+\boldsymbol{\eta}_{n-1/2})/2=\boldsymbol{\eta}_n$。它们都具有$\mathcal{O}(\gamma^2)$的精度。
记
$$\boldsymbol{v}_{n+1}=\gamma\boldsymbol{\eta}_{n+1/2},\quad \beta = \frac{1-\lambda\gamma/2}{1+\lambda\gamma/2},\quad \alpha = \frac{\gamma^2}{1+\lambda\gamma/2}\tag{15}$$
那么联合$(13),(14)$我们得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_n) \end{aligned}\tag{16}$$
这就是带Momentum的GD算法了。在数学上,他还有一个特别的名字,叫做“蛙跳积分法”。
如何加速? #
结合$(15)$和$(16)$两个式子,我们就可以观察到Momentum是如何加速GD了。
在GD的$(2)$中,学习率是$\gamma$,步长也是$\gamma$,精度是$\mathcal{O}(\gamma)$;在Momentum中,学习率是$\alpha\approx \gamma^2$,步长是$\gamma$,精度是$\mathcal{O}(\gamma^2)=\mathcal{O}(\alpha)$。这样一来,选定学习率$\alpha$后,在同样精度下,Momentum实际上是步长$\sqrt{\alpha}$前进的,而纯GD则是以步长$\alpha$前进的。
由于学习率一般小于1,所以$\sqrt{\alpha} > \alpha$。所以
Momentum加速的原理之一就是可以在同等学习率、不损失精度的情况下,使得整个算法以更大步长前进。
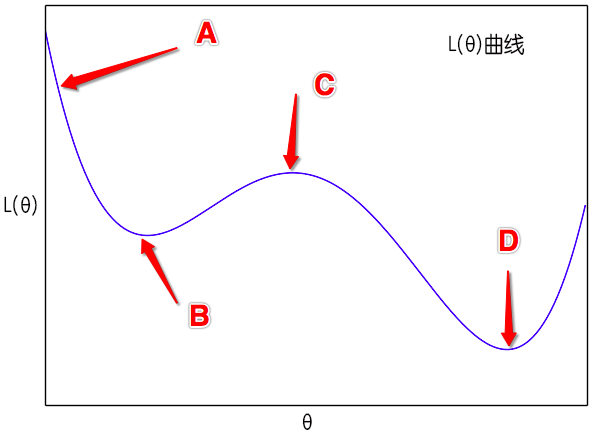
从A点出发,sgd+momentum能够到达D点,而sgd通常只能到达B点
此外,如图所示,假如从$A$点出发,那么梯度下降则会慢慢降低到$B$点来,最后停留在$C$点,当然,如果噪声、学习率比较大,那么它还有可能越过$C$点从而到达$D$点。但是有了动量加速后,这时$(10)$是一个动力学方程,牛顿力学的所有东西都可以搬到这里来。从$A$点出发,开始速度为0,然后慢慢下降,势能转化为动能,然后经过$B$点后慢慢上升,动能转化为势能,如果摩擦力比较小,那么到达$C$点后还有动能,那它就能直接到达$D$点去了。这是能量守恒保证的,哪怕没有噪声也可以。而在sgd中,要靠大学习率、小batch size(增强噪声)才能达到类似的效果。
所以,我们还可以说
Momentum加速为“越过”不那么好的极小值点提供了来自动力学的可能性。
那么$\lambda$应该要怎么选呢?直接让$\lambda=0$或$\beta=1$不成吗?
前面说到,$\lambda > 0$这一项相当于摩擦力,用来消耗能量,如果没有这一项,不管学习率多小,只要不为零,那么Momentum算法不会停留在极小值点,会一直动下去。就好比如果没有摩擦力的话,单摆就会不断摆动,不会停止,这是能量守恒决定的,能量守恒告诉我们,在能量的最低点(也就是我们期望的最小值点)时,动能是最大的,也就是速度是最快的,说白了,算法是根本停不下来~~但是如果有摩擦力消耗掉能量,能量不再守恒,那么单摆最终停留在能量的最低点。所以,引入$\lambda$对算法的收敛来说是必须的,同时从$(15)$我们有$\beta < 1$。但是,$\lambda$也不能过大,过大的摩擦力会导致运动没到达最低点就停止了,为了保证加速效果的存在,我们还有$\beta > 0$。
最后,从$(15)$式的$\beta$的定义可以看到,当固定$\lambda$时(也就是固定摩擦系数),如果学习率$\alpha$降低(意味着$\gamma$也降低),那么$\beta$应该随之升高,其中提升的比例可以进行简单的估算。由$(16)$我们得到近似$1-\lambda\sqrt{\alpha}=\beta$,从而可以反解出$\lambda$,然后代入新的$\alpha$,就可以算出新的$\beta$。。
这样我们就得到,SGD+Momentum的优化器中$\beta$的一个供参考的调参方案:
在使用SGD+Momentum时,如果降低学习率,那么应当轻微提升$\beta$。当学习率从$\alpha$降到$r\alpha$时,$\beta$可以考虑提升到$1 - (1-\beta)\sqrt{r}$。
Nesterov动量 #
Momentum算法本质上在数值求解$(10)$,而求解$(10)$并不只有$(13),(14)$这种显式的迭代格式,还有隐式的迭代。比如我们可以将$(10)$近似为
$$\begin{aligned}&\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma} = \frac{\boldsymbol{\eta}_{n+1}+\boldsymbol{\eta}_{n}}{2}\\
&\frac{\boldsymbol{\eta}_{n+1}-\boldsymbol{\eta}_{n-1}}{2\gamma} = -\lambda \frac{\boldsymbol{\eta}_{n}+\boldsymbol{\eta}_{n-1}}{2} - \nabla_{\boldsymbol{\theta}} L\left(\frac{\boldsymbol{\theta}_{n+1}+\boldsymbol{\theta}_n}{2}\right)
\end{aligned}\tag{17}$$
设
$$\boldsymbol{v}_{n+1}=\frac{\gamma}{2}(\boldsymbol{\eta}_{n+1}+\boldsymbol{\eta}_{n}),\quad \beta = 1-\lambda\gamma,\quad \alpha=\gamma^2\tag{18}$$
就得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\frac{\boldsymbol{\theta}_{n+1}+\boldsymbol{\theta}_n}{2}\right) \end{aligned}\tag{19}$$
这是一种隐式的迭代公式,理论上为了求$\boldsymbol{\theta}_{n+1}$我们还需要解一个非线性方程组。但近似来看,只需要将$\boldsymbol{\theta}_{n+1}$用$\boldsymbol{\theta}_{n}+\beta \boldsymbol{v}_{n}$近似,得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n\right) \end{aligned}\tag{20}$$
如果将括号里边的$\beta/2$替换成$\beta$,那么就是标准的带Nesterov动量的GD算法,然而我觉得上式似乎更加合理,因为Nesterov算法想着用$\boldsymbol{\theta}_{n+1}$处的梯度代替$\boldsymbol{\theta}_n$处的梯度,以赋予算法“前瞻能力”,但事实上还是有偏了,直觉上用$(\boldsymbol{\theta}_n+\boldsymbol{\theta}_{n+1})/2$处的梯度更加“中肯”一些。
从误差分析来看,其实不管是标准的Momentum还是Nesterov版本,都是一个二阶算法,精确度相同(只是一个常数级的差别)。但理论上Nesterov是一个隐式的迭代,稳定域更广一些,所以通常能得到更好的效果。
怎么用tf等框架实现$(20)$式呢?注意$(20)$涉及到了将$L(\boldsymbol{\theta})$先对$\boldsymbol{\theta}$求导,然后将$\boldsymbol{\theta}$替换成$\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n$(我这里的Nesterov)或$\boldsymbol{\theta}_n + \beta\boldsymbol{v}_n$(标准的Nesterov),这个操作在我们看来应当是很简单的,但是在tf等框架下就有点繁琐了。
因为这些框架虽然是有自动求导功能,但它们终究只是一个数值计算框架,而不是符号计算系统,所以结果只是一个数值导数。当我们求出$\boldsymbol{\theta}$的导数时,结果是一个张量,是一些确定的数,要将$\boldsymbol{\theta}$替换成$\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n$就有点难办了。当然不是不可能,但终究没有Momentum版的一步到位来得简单。
于是为了便于实现,我们设(以标准的Nesterov为例):
$$\boldsymbol{\Theta}_n=\boldsymbol{\theta}_n + \beta\boldsymbol{v}_n$$
那么可以得到新的迭代公式:
$$\begin{aligned}&\boldsymbol{\Theta}_{n+1} = \boldsymbol{\Theta}_{n} + \beta\boldsymbol{v}_{n+1} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\Theta}_n\right) \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\Theta}_n\right) \end{aligned}$$
这就是主流框架的Nesterov算法的实现方式,比如Keras的,这样就免除了自变量替换的过程。随着迭代越来越靠近极小值点,动量$\boldsymbol{v}$会越来越小,所以$\boldsymbol{\Theta}$和$\boldsymbol{\theta}$最终将会等价的——就算有一点误差也不打紧,因为我们用动量的根本目的是为了加速,而选择模型还是看valid集的效果。
Kramers方程 #
前面讨论的只是全量梯度下降的动量加速方法,最后简单分析一下随机梯度下降下的情形。跟前面一样的假设,引入随机梯度后,我们可以认为$(10)$变成了带随机力的方程
$$\ddot{\boldsymbol{\theta}} + \lambda \dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})+\sigma\boldsymbol{\xi}\tag{21}$$
这称为“Kramers方程”,跟朗之万方程一样,都是随机动力学里边的核心成果。当$\lambda=0$时,静态解可以写出来,这个静态分布可以作为一般情况下的参考:
$$P(\boldsymbol{\theta},\boldsymbol{\eta}) \sim \exp\left(-\frac{\boldsymbol{\eta}^2/2 + L(\boldsymbol{\theta})}{\sigma^2}\right)\tag{22}$$
其中$\boldsymbol{\eta}=\dot{\boldsymbol{\theta}}$,而$\boldsymbol{\theta}$的边缘分布就是$(9)$式,因此可以认为前面的纯SGD的分析在Momentum和Nesterov算法中同样成立。
思考回顾 #
本文希望通过动力学的方式来分析SGD的相关内容。对于文章开头提出的一些问题,本文并不能准确地给出答案,但我估计能够有点启发。尽管文章比较冗长,公式略多,但是本科学过数值计算的读者,应该都不难看懂的。如果有什么疑问,欢迎继续留言讨论~
转载到请包括本文地址:https://kexue.fm/archives/5655
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jun. 27, 2018). 《从动力学角度看优化算法(一):从SGD到动量加速 》[Blog post]. Retrieved from https://kexue.fm/archives/5655
@online{kexuefm-5655,
title={从动力学角度看优化算法(一):从SGD到动量加速},
author={苏剑林},
year={2018},
month={Jun},
url={\url{https://kexue.fm/archives/5655}},
}

June 28th, 2018
您好,(13)式之前的那段话有些不大理解,能麻烦您再解释一下么?
泰勒展开
$$\boldsymbol{\theta}(n\varepsilon+\varepsilon)=\boldsymbol{\theta}(n\varepsilon) + \varepsilon \dot{\boldsymbol{\theta}}(n\varepsilon) + \frac{1}{2}\varepsilon^2 \ddot{\boldsymbol{\theta}}(n\varepsilon)+ \frac{1}{6}\varepsilon^3 \dddot{\boldsymbol{\theta}}(n\varepsilon)+\dots$$
所以
$$\frac{\boldsymbol{\theta}(n\varepsilon+\varepsilon)-\boldsymbol{\theta}(n\varepsilon)}{\varepsilon}=\dot{\boldsymbol{\theta}}(n\varepsilon) + \frac{1}{2}\varepsilon \ddot{\boldsymbol{\theta}}(n\varepsilon)+\frac{1}{6}\varepsilon^2 \dddot{\boldsymbol{\theta}}(n\varepsilon)+\dots$$
因此
$$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\varepsilon}=\dot{\boldsymbol{\theta}}_n+\mathcal{O}(\varepsilon)$$
而
$$\begin{aligned}\dot{\boldsymbol{\theta}}\left(n\varepsilon+\frac{1}{2}\varepsilon\right)=&\dot{\boldsymbol{\theta}}(n\varepsilon) + \frac{1}{2}\varepsilon \ddot{\boldsymbol{\theta}}(n\varepsilon) + \frac{1}{8}\varepsilon^2 \dddot{\boldsymbol{\theta}}(n\varepsilon)+\dots\\
=&\frac{\boldsymbol{\theta}(n\varepsilon+\varepsilon)-\boldsymbol{\theta}(n\varepsilon)}{\varepsilon}-\frac{1}{24}\varepsilon^2 \dddot{\boldsymbol{\theta}}(n\varepsilon)\dots\\
=&\frac{\boldsymbol{\theta}(n\varepsilon+\varepsilon)-\boldsymbol{\theta}(n\varepsilon)}{\varepsilon}-\mathcal{O}(\varepsilon^2)
\end{aligned}$$
所以$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\varepsilon}$更接近于$\boldsymbol{\theta}_{n+1/2}$。
谢谢!多谢您的详解。
June 29th, 2018
哇这一篇真的很有用
July 2nd, 2018
正好期末偏微分方程复习的时候看到这篇,没想到动量还可以这样分析。
羡慕作者能够学以致用,学的时候完全没向这方面想,作者能说说是怎么想到从微分方程的角度分析的嘛?
心底的渴望 + 直觉 + 多次试探~
其实sgd对应一阶ode并不难想到,sgd+momentum对应二阶ode倒是推了很久。
July 16th, 2018
您好,请问SGD那部分的分析有相关文献吗?
不好意思,没有参考啥文章,就是即兴写的
www4.comp.polyu.edu.hk/~csjunxu/paper/pid-cnn_cvpr2018.pdf
http://proceedings.mlr.press/v32/satoa14.pdf
谢谢,这两个很有用
September 10th, 2018
[...]原始需求来源于之前的文章 《从动力学角度看SGD:一些小启示》 ,里边指出梯度下降优化器可以看成是微分方程组的欧拉解法,进一步可以联想到,微分方程组有很多比欧拉解法更高级的解法呀,能不能用到深度学习中?比如稍微高级一点的有“ Heun方法 ”:[...]
October 31st, 2018
苏神,17到18的过程求解的系数是不是有点问题?我得到的系数$\beta=\frac{1}{1+\lambda\epsilon}, a=\frac{\epsilon^2}{1+\lambda\epsilon}$?
你的推导应该没错,不过简单起见,我直接修改了一下$(17)$式了。
现在怎么从(10)近似到(17)呢?
就直接近似啊,差分代替导数。
January 11th, 2019
你好,请问从公式(8)到公式(9)的过程可以大致写一下吗?我没学过动力学方程,看了好一阵子还没有推出来~求大佬指点一下,感谢!!
简单不了。这需要了解sde,然后将sde转化为fokker-planck方程,然后求静态解。
嗯嗯,今天我又推导了一下,求出来了!再次感谢!
October 23rd, 2019
"这里我们假设
∇θL(θn)−∇θLR(θn)=ξn(7)
服从一个方差为σ2的正态分布"
这样假设的依据是什么?可以假设数据分布服从高斯分布没错,但损失函数并不是线性的,求告知。
这只是为了得到一个理论解的一个强行假设,让我们简单看一下噪声的作用。
当然,如果勉强说的话,还可以说依据是中心极限定理。
June 3rd, 2020
请教作者,是否有关于学习率和步长的严格定义,二者本质区别在哪?
目前梯度优化器的更新格式基本上都可以写为$\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \alpha\boldsymbol{m}_{n+1}$,这里的$\alpha$就是指学习率,但是由于不同的优化器$\boldsymbol{m}_{n+1}$的含义不一样,所以$\alpha$严格上来说没有什么确定的含义,它就是优化器里边的一个超参数。
而步长则是每次走的步幅(你可以粗糙理解为每步向最优点靠近的距离)。
依据上面的解释,能否理解步长就是αmn+1,这样看学习率和步长量纲是不同的。在“如何加速”这一节里,GD的学习率=步长=γ就很令我困惑。
另外由于缺乏严格定义,Momentum GD(16式)的学习率和步长又是依据什么标准来确定,从而得到步长是sqrt(α)?
如果局限于本文,那么我们虚拟了一个“时间”的概念,即$\boldsymbol{\theta}(t)$,初始值是$t=0$,假如终点是$t=1$,那么我们就要从$\boldsymbol{\theta}(0)$出发,求$\boldsymbol{\theta}(1)$的值(理论值)。
步长$\gamma$就是数值计算中,每步要走的大小,比如$\gamma=0.1$,那么就意味着你整个迭代过程要执行10步。步长越大,执行步数越小,但最终结果一般会误差更大。
本文的系列是“从动力学角度看优化算法”,如果对ODE的数值解法比较了解,那么这些概念应该是不难理解的。
August 8th, 2021
您好,想问一下动量或者自适应优化器的参数为什么设置为0.9,0.99,这么大,感觉这样设置的话,是不是代表当前更新的方向受历史梯度影响比较大,受当前梯度影响比较小呢?
“当前”只是一个小的batch,这么小的batch估计出来的梯度本身就不一定特别准确,自然要多个batch平均更靠谱。
您好,我看其他文章说“sgd将相同的学习率用于各个参数,无法实现对常出现的特征更新慢,对不常出现的特征更新快的要求,而Adam可以”这个不是特别理解,比如一群年轻人数据样本,二维特征分别是(年龄,体重),因为年龄大概只能取18-30的整数,体重则可以取很多值,这样是不是代表年龄特征常出现,体重不常出现,但是还是不能理解更新速度在特征上的区别
你说的结论是错的,而且刚刚相反。Adam等自适应优化器,才是将大致相同的更新量应用到各个参数中。
要注意,在SGD中,参数的更新量是等于“\text{梯度}\times{学习率}”,更新量的大小不仅取决于学习率,还去取决于梯度,所以SGD对每个参数的更新幅度是不一样的(哪怕学习率固定)。而Adam这类自适应优化器中,更新量大质是“\frac{\text{梯度}}{\sqrt{\text{梯度}\otimes\text{梯度}}}\times{学习率}”,所以大致上它们只依赖于梯度的方向和学习率,如果固定学习率的话,那么每个参数的更新量大致都是一样的(至少量级上大致相同)。
至于“常出现的特征更新慢,对不常出现的特征更新快”,我认为是所有优化器的共同特点...
参数的更新量这里我好像能理解了,但这样的话自适应优化器的自适应主要体现在什么地方呢?感觉只依赖于梯度方向和学习率的话,因为学习率固定,那这样话感觉好像碰到一个局部极小点就掉进去了,\frac{\text{梯度}}{\sqrt{\text{梯度}\otimes\text{梯度}}}\times{学习率}(1)这个更新量近似等于梯度的方向和学习率,如果它小于坑的宽度的话,感觉就掉进去了。不过好像确实前期的式(1)*学习率会大于后期的式(1)*学习率,也就是前期的更新量大,后期的更新量小,不知道自适应指的是不是这个。
自适应就体现在每个参数适用大致相同的更新幅度,公平地对待每一个参数。
另外,不要动不动就“陷入局部最优”这类断言。事实上对于复杂的神经网络来说,我们连个局部最优都找不到。